




XBD-1320 Gymmat metal çotga DC motor
Önümiň tanyşdyrylyşy
XBD-1320 Gymmat metal çotga DC motor ýokary öndürijilikli hereketlendiriji bolup, gymmat bahaly metal çotgalary ulanýar, ajaýyp netijeliligi we öndürijiligi üpjün edýär. Pes sesli we rahat işlemek bilen bu hereketlendiriji sesiň peselmegini talap edýän programmalar üçin ajaýyp. Ykjam we ýeňil dizaýny, ýokary tork çykaryşyny we takyk gözegçiligini üpjün edip, dürli programmalar üçin amatly edip, dürli ulgamlara aňsat birleşmäge mümkinçilik berýär. Bu hereketlendiriji, şeýle hem ýokary çydamly we ygtybarly, uzak işleýiş möhleti bilen, ygtybarlylygy, çydamlylygy we ýokary öndürijiligi talap edýän ýokary islegli programmalar üçin ajaýyp maýa goýumyna öwrülýär. Mundan başga-da, XBD-1320 hereketlendirijisi goşmaça köpugurlylyk we özleşdirmek üçin toplumlaýyn dişli guty we kodlaýjy opsiýalaryny özünde jemleýär we ýokary aýlaw tizligini talap edýän programmalar üçin amatly edip, ýokary tizlikde işläp bilýär.
Arza
Sinbad ýadrosyz hereketlendiriji, robotlar, pilotsyz uçarlar, lukmançylyk enjamlary, awtoulaglar, maglumat we aragatnaşyk, elektrik gurallary, gözellik enjamlary, takyk gurallar we harby senagat ýaly köp sanly amaly ulanýar.










Üstünlik
XBD-1320 Gymmat metal çotga DC motor aşakdaky artykmaçlyklary hödürleýär:
1. Gymmat bahaly metal çotgalaryň ulanylmagy sebäpli ýokary netijelilik we öndürijilik.
2. Pes sesli we rahat işlemek, asuda işlemegi talap edýän programmalar üçin amatly.
3. Dürli ulgamlara we enjamlara aňsat birleşmäge mümkinçilik berýän ykjam we ýeňil dizaýn.
4. torokary tork çykarylyşy we takyk dolandyryş, ony köp sanly programmada ulanmak üçin amatly edýär.
5. Çydamly we ygtybarly, uzak ömri bilen.
6. Goşmaça köpugurlylyk we özleşdirmek üçin toplumlaýyn dişli guty we kodlaýjy opsiýalary.
7. highokary aýlaw tizligini talap edýän programmalar üçin amatly edip, ýokary tizlikde işläp biler.
8. Ygtybarlylygy, çydamlylygy we ýokary öndürijiligi talap edýän ýokary islegli programmalar üçin amatly.
Parametr
| Motor modeli 1320 | |||||
| Çotga materialgymmat bahaly metal | |||||
| Nominalda | |||||
| Nominal naprýa .eniýe | V | 3.7 | 6 | 12 | 24 |
| Nominal tizlik | rpm | 7600 | 9600 | 10400 | 9600 |
| Nominal tok | A | 0.288 | 0.358 | 0.133 | 0.074 |
| Nominal tork | mNm | 0.9 | 1.5 | 1.0 | 1.2 |
| Mugt ýük | |||||
| Loadük tizligi ýok | rpm | 9500 | 12000 | 13000 | 12000 |
| Loadük ýok | mA | 35.0 | 30.0 | 16.0 | 10.0 |
| Iň ýokary netijelilikde | |||||
| Iň ýokary netijelilik | % | 69.9 | 71.1 | 70.0 | 68.2 |
| Tizlik | rpm | 8170 | 10320 | 11180 | 10200 |
| Häzirki | A | 0.212 | 0.263 | 0.098 | 0.058 |
| Tork | mNm | 0.64 | 1.04 | 0.70 | 0.89 |
| Iň ýokary çykyş güýji | |||||
| Iň ýokary çykyş güýji | W | 1.1 | 2.3 | 1.7 | 1.9 |
| Tizlik | rpm | 4750 | 6000 | 6500 | 6000 |
| Häzirki | A | 0.70 | 0.80 | 0.31 | 0.17 |
| Tork | mNm | 2.3 | 3.7 | 2.5 | 3.0 |
| Dükanda | |||||
| Tok toguny | A | 1.30 | 1.63 | 0.60 | 0.33 |
| Duralga momenti | mNm | 4.58 | 7.41 | 5.01 | 5.93 |
| Motor yzygiderliligi | |||||
| Terminalyň garşylygy | Ω | 2.85 | 3.68 | 20.00 | 72.73 |
| Terminal induksion | mH | 0.09 | 0.12 | 0.50 | 1.30 |
| Tork hemişelik | mNm / A. | 3.62 | 4.66 | 8.58 | 18.52 |
| Tizlik hemişelik | rpm / V. | 2567.6 | 2000.0 | 1083.3 | 500.0 |
| Tizlik / Tork hemişelik | rpm / mNm | 2075.1 | 1620.4 | 2594.5 | 2024.9 |
| Mehaniki wagt hemişelik | ms | 5.3 | 4.2 | 5.6 | 4.6 |
| Rotor inersiýasy | g ·cm² | 0.25 | 0.25 | 0.20 | 0.22 |
| Polýus jübütleriniň sany 1 | |||||
| 5-nji tapgyryň sany | |||||
| Motoryň agramy | g | 13 | |||
| Adaty ses derejesi | dB | ≤38 | |||
Nusgalar


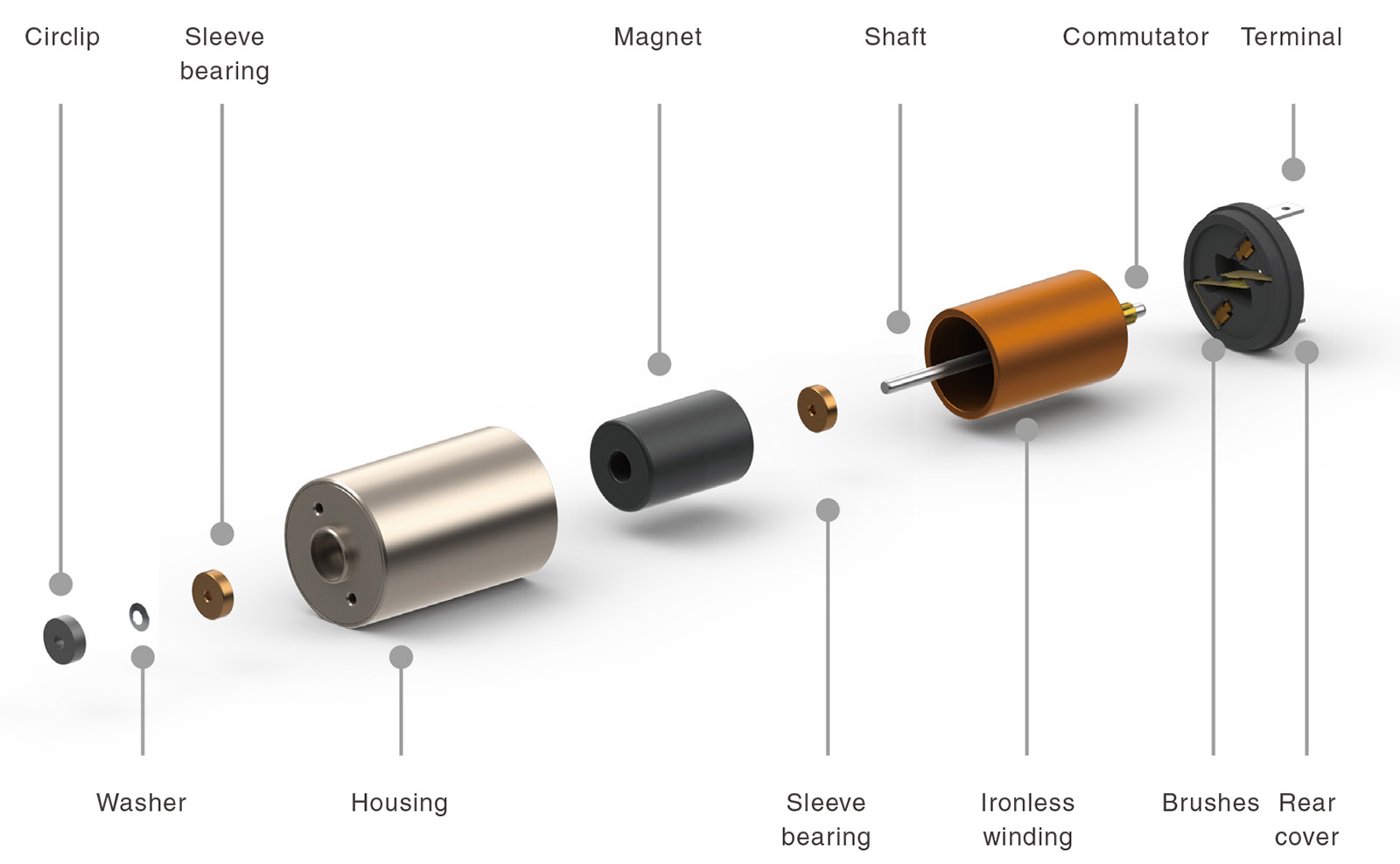
Gurluşlar
Sorag-jogap
J: Hawa. 2011-nji ýyldan bäri Coreless DC Motor-da ýöriteleşen öndüriji.
J: Bizde QC topary TQM-e laýyk gelýär, her ädim standartlara laýyk gelýär.
J: Adatça MOQ = 100pcs. Emma kiçi partiýa 3-5 bölek kabul edilýär.
J: Mysal size elýeterlidir. jikme-jiklikler üçin biziň bilen habarlaşmagyňyzy haýyş edýäris. Nusga tölegini alanymyzdan soň, özüňizi aňsat duýuň, köpçülikleýin sargyt bereniňizde yzyna gaýtarylar.
J: bize gözleg iberiň → sitatamyzy alyň → gepleşikler jikme-jiklikleri → nusgany tassyklaň → şertnama gol çekiň / goýum → köpçülikleýin önümçilik → ýük taýýar → balans / gowşuryş → mundan beýläkki hyzmatdaşlyk.
J: Eltip bermek wagty sargyt eden mukdaryňyza bagly. köplenç 30 ~ 45 senenama güni gerek.
J: T / T-ni öňünden kabul edýäris. Şeýle hem, ABŞ-ly gurjak ýa-da RMB we ş.m. ýaly pul almak üçin dürli bank hasabymyz bar.
J: T / T, PayPal tarapyndan tölegi kabul edýäris, beýleki töleg usullary hem kabul edilip bilner, Beýleki töleg usullary bilen tölemezden ozal biziň bilen habarlaşyň. Şeýle hem 30-50% goýum bar, galyndy pul iberilmezden öň tölenmeli.
Düşnüksiz çotga DC hereketlendirijileri, robotdan başlap lukmançylyk enjamlaryna çenli awtoulag dizaýnyna çenli köp dürli programmalarda ulanylýan möhüm enjamlardyr. Highokary netijeliligi, pes ses we uzak ömri bilen tanalýar.
Düwürtiksiz çotga DC motorynyň esasy aýratynlygy onuň dizaýnydyr. Adaty çotga DC hereketlendirijilerinden tapawutlylykda, ýadrosyz hereketlendirijilerde rotorda demir ýadro ýok. Muňa derek, plastmassa ýa-da beýleki metal däl materiallara örtülen mis simleriň egremesi bar.
Bu üýtgeşik dizaýn köp peýdalary hödürleýär. Ilki bilen, motoryň umumy agramyny peseldýär, agramy esasy hasaplanýan programmalar üçin amatly edýär. Mundan başga-da, demir ýadrosynyň ýoklugy, demir ýadrosy rotory herekete getirmek üçin ulanyljak energiýanyň bir bölegini siňdirende ýüze çykýan histereziýa mümkinçiligini hem aradan aýyrýar. Bu, işlemek üçin az güýji talap edýän has täsirli hereketlendirijini döredýär.
Düwürtiksiz ýuwulan DC hereketlendirijileriniň ýene bir esasy aýratynlygy, olaryň ýokary güýç dykyzlygydyr. Bu kiçijik paketde köp tork öndürmäge ukyplydygyny aňladýar. Bu, mikro-robotlar ýa-da dronlar ýaly giňişlik ýokary bolan programmalarda ulanmak üçin amatly edýär. Motoryň ýokary kuwwatlylygy dykyzlygy, şeýle hem ýokary gyzgynlykda işlemän, ýokary tizlikli programmalarda ulanmak üçin amatly edip biljekdigini aňladýar.
Düwürtiksiz ýuwulan DC hereketlendirijileriniň ýene bir esasy aýratynlygy pes ses. Motoryň demir ýadrosy ýoklugy sebäpli, magnit meýdany emele getirmeýär, bu adaty çotga DC hereketlendirijileri bilen baglanyşykly sesiň ýa-da sesiň ýokdugyny aňladýar. Bu, ýadro hereketlendirijilerini lukmançylyk enjamlary ýa-da ses enjamlary ýaly asuda işlemek zerur bolan şertlerde ulanmak üçin amatly edýär.
Düşnüksiz çotga DC hereketlendirijileri ygtybarlylyk meselesinde birnäçe artykmaçlygy hödürleýär. Demir ýadrosy ýoklugy sebäpli, demir ýadrosynyň wagtyň geçmegi bilen magnitlenmegi we motoryň işleýşiniň peselmegi howpy ýok. Mundan başga-da, demir ýadrosynyň ýoklugy motor çotgalarynda az könelmegi we ýyrtylmagyny aňladýar, netijede uzak ömür bolýar.
Netijede, programmanyň aýratyn talaplaryny kanagatlandyrmak üçin ýadrosyz çotga DC hereketlendirijileri düzülip bilner. Mysal üçin, hereketlendirijide sargylaryň sanyny üýtgetmek bilen, ahyrky ulanyjynyň isleglerini has gowy kanagatlandyrmak üçin motoryň torky ýa-da tizligi sazlanyp bilner. Bu, ýadrosyz çotga DC hereketlendirijilerini köp sanly amaly zerurlyklary kanagatlandyryp boljak ýokary derejeli enjam edýär.
Gysgaça aýtsak, ýadrosyz çotga DC hereketlendirijileri köp sanly aýratynlyklar we artykmaçlyklar bar, olary köp sanly programma üçin ideal edýär. Onuň ýeňil agramy, güýçli dykyzlygy, pes ses we uzak ömri ony robot, lukmançylyk enjamlary, ses enjamlary we beýleki köp ugurlarda ulanmak üçin amatly edýär. Mundan başga-da, özboluşlylygy, islendik programmanyň aýratyn zerurlyklaryna laýyk gelmäge mümkinçilik döredýär we geljekki ýyllarda bil baglap boljak hakykatdanam köpugurly enjam bolýar.