





XBD-1320 Gymmatbaha metal çotkaly DC motory
Önümiň tanyşdyrylyşy
XBD-1320 Gymmatbaha Metally Çotgaly DC Motor, gymmatbaha metal çotgalaryny ulanýan ýokary öndürijilikli motor bolup, ajaýyp netijeliligi we öndürijiligi üpjün edýär. Pes sesli we ýumşak işlemegi bilen bu motor sesi azaltmagy talap edýän ulanyşlar üçin ajaýypdyr. Onuň ykjam we ýeňil dizaýny dürli ulgamlara aňsatlyk bilen integrasiýa etmäge mümkinçilik berýär, şol bir wagtyň özünde ýokary moment çykaryşyny we takyk dolandyryşy üpjün edýär, bu bolsa ony dürli ulanyşlar üçin amatly edýär. Bu motor şeýle hem uzak iş möhleti bilen örän berk we ygtybarlydyr, bu bolsa ony ygtybarlylygy, berkligi we ýokary öndürijiligi talap edýän ýokary isleg bildirilýän ulanyşlar üçin ajaýyp maýa goýum edýär. Mundan başga-da, XBD-1320 motory goşmaça köpugurlylygy we özleşdirilmegi üçin integrasiýa edilen reduktor we kodlaýjy opsiýalaryna eýedir we ýokary tizlikde işläp bilýär, bu bolsa ony ýokary aýlanma tizligini talap edýän ulanyşlar üçin ajaýyp edýär.
Programma
Sinbad ýadrosyz motory robotlar, dronlar, lukmançylyk enjamlary, awtoulaglar, maglumat we aragatnaşyk, elektrik gurallary, gözellik enjamlary, takyk gurallar we harby senagat ýaly giň ulanylyş ugurlaryna eýedir.










Artykmaçlyk
XBD-1320 gymmatly metaldan ýasalan çotkaly DC motory aşakdaky artykmaçlyklary hödürleýär:
1. Gymmat bahaly metal çotgalaryň ulanylmagy sebäpli ýokary netijelilik we iş görkezijisi.
2. Pes sesli we ýumşak işleýiş, sessiz işleýşi talap edýän programmalar üçin amatly edýär.
3. Dürli ulgamlara we enjamlara aňsatlyk bilen integrasiýa etmäge mümkinçilik berýän ykjam we ýeňil dizaýn.
4. Ýokary moment çykyşy we takyk dolandyryş, ony dürli ugurlarda ulanmaga amatly edýär.
5. Çydamly we ygtybarly, uzak iş möhleti bilen.
6. Goşmaça köpugurlylyk we özleşdirme üçin integrasiýa edilen reduktor we kodlaýjy opsiýalary.
7. Ýokary tizlikde işläp bilýär, bu bolsa ýokary aýlanma tizligini talap edýän programmalar üçin amatlydyr.
8. Ygtybarlylygy, berkligi we ýokary öndürijiligi talap edýän ýokary talap edilýän ulanyşlar üçin amatly.
Parametr
| 1320-nji modeldäki motor | |||||
| Çotga materialygymmatbaha metal | |||||
| Nominal derejede | |||||
| Nominal naprýaženiýe | V | 3.7 | 6 | 12 | 24 |
| Nominal tizlik | aýlanma/minut | 7600 | 9600 | 10400 | 9600 |
| Nominal tok | A | 0.288 | 0.358 | 0.133 | 0.074 |
| Nominal moment | mNm | 0.9 | 1.5 | 1.0 | 1.2 |
| Mugt ýük | |||||
| Ýüksüz tizlik | aýlanma/minut | 9500 | 12000 | 13000 | 12000 |
| Ýüksüz tok | mA | 35.0 | 30.0 | 16.0 | 10.0 |
| Maksimum netijelilikde | |||||
| Maksimum netijelilik | % | 69.9 | 71.1 | 70.0 | 68.2 |
| Tizlik | aýlanma/minut | 8170 | 10320 | 11180 | 10200 |
| Häzirki | A | 0.212 | 0.263 | 0.098 | 0.058 |
| Moment | mNm | 0.64 | 1.04 | 0.70 | 0.89 |
| Maksimum çykyş kuwwatynda | |||||
| Maksimum çykyş güýji | W | 1.1 | 2.3 | 1.7 | 1.9 |
| Tizlik | aýlanma/minut | 4750 | 6000 | 6500 | 6000 |
| Häzirki | A | 0.70 | 0.80 | 0.31 | 0.17 |
| Moment | mNm | 2.3 | 3.7 | 2.5 | 3.0 |
| Saklama ýerinde | |||||
| Duralga tok | A | 1.30 | 1.63 | 0.60 | 0.33 |
| Duralga momenti | mNm | 4.58 | 7.41 | 5.01 | 5.93 |
| Motoryň sabitleri | |||||
| Terminalyň garşylygy | Ω | 2.85 | 3.68 | 20.00 | 72.73 |
| Terminal induktiwligi | mH | 0.09 | 0.12 | 0.50 | 1.30 |
| Moment sabiti | mNm/A | 3.62 | 4.66 | 8.58 | 18.52 |
| Tizlik sabiti | aýlanma/V | 2567.6 | 2000.0 | 1083.3 | 500.0 |
| Tizlik/Moment sabiti | aýlanma/mNm | 2075.1 | 1620.4 | 2594.5 | 2024.9 |
| Mehaniki wagt sabiti | ms | 5.3 | 4.2 | 5.6 | 4.6 |
| Rotor inersiýasy | g·cm² | 0.25 | 0.25 | 0.20 | 0.22 |
| Polýus jübütleriniň sany 1 | |||||
| 5-nji fazanyň sany | |||||
| Motoryň agramy | g | 13 | |||
| Adaty ses derejesi | dB | ≤38 | |||
Nusgalar


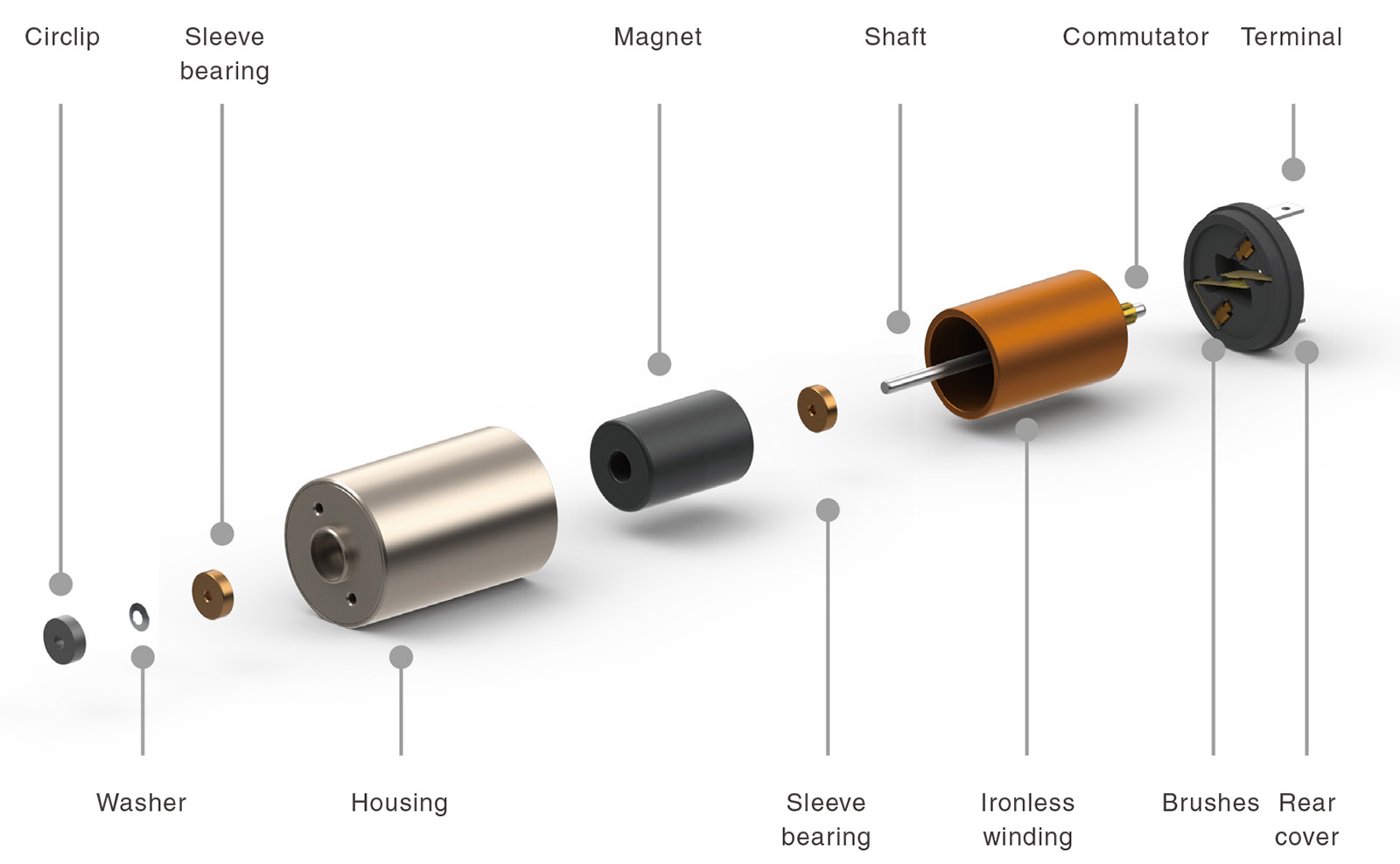
Gurluşlar
Köp soralýan soraglar
A: Hawa. Biz 2011-nji ýyldan bäri özelsiz DC motoryna ýöriteleşen önüm öndüriji.
A: Bizde QC topary TQM-e laýyk gelýär, her ädim standartlara laýyk gelýär.
A: Adatça, MOQ = 100 sany. Ýöne kiçi partiýaly 3-5 sany kabul edilýär.
A: Nusga siziň üçin elýeterlidir. Jikme-jik maglumat üçin biziň bilen habarlaşyň. Sizden nusga tölegini alanymyzdan soň, özüňizi rahat duýuň, köpçülikleýin sargyt edeniňizde puluňyz yzyna gaýtarylar.
A: bize sorag iberiň → teklibimizi alyň → jikme-jiklikleri gepleşik ediň → nusgany tassyklaň → şertnama/goýum gol çekiň → köpçülikleýin önümçilik → ýük taýýar → balans/eltip bermek → mundan beýläk hyzmatdaşlyk ediň.
A: Eltip bermek wagty sargyt eden mukdaryňyza baglydyr. Adatça 30 ~ 45 senenama güni gerek bolýar.
A: Biz T/T-ni öňünden kabul edýäris. Şeýle hem, ABŞ dollary ýa-da RMB ýaly pul almak üçin dürli bank hasaplarymyz bar.
A: Biz tölegleri T/T, PayPal arkaly kabul edýäris, beýleki töleg usullary hem kabul edilip bilner, beýleki töleg usullary bilen tölemezden öň biziň bilen habarlaşyň. Şeýle hem 30-50% öňünden töleg bar, galan pul ibermezden öň tölenmeli.
Özeksiz çotkaly DC motorlary robototehnikadan lukmançylyk enjamlaryna we awtoulag dizaýnyna çenli dürli ulgamlarda ulanylýan möhüm enjamlardyr. Ol ýokary netijeliligi, pes sesi we uzak ömürliligi bilen tanalýar.
Özersiz çotkaly DC motorynyň esasy aýratynlygy onuň dizaýnydyr. Adaty çotkaly DC motorlaryndan tapawutlylykda, özersiz motorlaryň rotorynda demir özeni ýok. Onuň ýerine, ol plastik ýa-da beýleki metal däl materiallara sarylan mis simden ýasalan sargyja eýedir.
Bu özboluşly dizaýn köp artykmaçlyklary hödürleýär. Birinjiden, ol motoryň umumy agramyny azaldýar we agramyň esasy üns berilýän ýerlerde ulanmak üçin amatly edýär. Mundan başga-da, demir özeniniň ýoklugy, demir özen rotory herekete getirmek üçin ulanyljak energiýanyň käbir bölegini özüne siňdirende ýüze çykýan gistereziň mümkinçiligini hem aradan aýyrýar. Bu bolsa, işlemegi üçin az güýç talap edýän has netijeli motora getirýär.
Özensiz çotkaly DC motorlarynyň ýene bir esasy aýratynlygy olaryň ýokary kuwwatlylyk dykyzlygydyr. Bu onuň kiçi gaplamada köp moment öndürip bilýändigini aňladýar. Bu bolsa ony mikrorobotlar ýa-da dronlar ýaly giňişligiň gymmat bolan ýerlerinde ulanmak üçin amatly edýär. Motoryň ýokary kuwwatlylyk dykyzlygy onuň gyzdyrmazdan ýokary tizlikde işläp bilýändigini hem aňladýar, bu bolsa ony ýokary tizlikli ýerlerde ulanmak üçin amatly edýär.
Özensiz çotkaly DC motorlarynyň ýene bir esasy aýratynlygy pes sesdir. Motoryň demir özeni ýok bolany üçin, ol magnit meýdanyny döretmeýär, bu bolsa däp bolan çotkaly DC motorlary bilen baglanyşykly gygyrdama ýa-da gygyrdama ýokdugyny aňladýar. Bu bolsa özensiz motorlary lukmançylyk enjamlary ýa-da ses enjamlary ýaly sessiz işlemegiň zerur bolýan gurşawlarynda ulanmak üçin amatly edýär.
Özensiz çotkaly DC motorlary ygtybarlylyk babatda birnäçe artykmaçlyklary hödürleýär. Demir özeni ýok bolany üçin, demir özeniň wagtyň geçmegi bilen magnitlenmegi we motoryň işini peseltmegi howpy ýok. Mundan başga-da, demir özeniň ýoklugy motor çotkalarynyň az aşynmagyny we ýyrtylmagyny aňladýar, bu bolsa ömrüniň uzamagyna getirýär.
Ahyrsoňy, özensiz çotkaly DC motorlary ulanylyşyň anyk talaplaryna laýyklyk üçin sazlanyp bilner. Mysal üçin, motordaky sargylaryň sanyny üýtgetmek arkaly motoryň momentini ýa-da tizligini ahyrky ulanyjynyň zerurlyklaryny has gowy kanagatlandyrmak üçin sazlap bolýar. Bu bolsa özensiz çotkaly DC motorlaryny dürli ulanylyş zerurlyklaryny kanagatlandyrmak üçin sazlanyp bilinýän örän köpugurly enjama öwürýär.
Gysgaça aýdylanda, özensiz çotkaly DC motorlarynyň köp sanly özboluşly aýratynlyklary we artykmaçlyklary bar, bu bolsa olary dürli ulanyşlar üçin amatly edýär. Onuň ýeňil agramy, ýokary kuwwatlylyk dykyzlygy, pes ses we uzak ömürliligi ony robototehnikada, lukmançylyk enjamlarynda, ses enjamlarynda we başga-da köp ugurlarda ulanmak üçin amatly edýär. Mundan başga-da, onuň sazlanmagy ony islendik ulanyşyň aýratyn zerurlyklaryna laýyklaşdyrmaga mümkinçilik berýär, bu bolsa ony geljek ýyllarda bil baglap boljak hakykatdanam köpugurly enjama öwürýär.
-
XBD-1928 Gymmatbaha metal çotkaly DC motory
-
XBD-2642 motoryň özeksiz m-de metal çotkasyny ulanmak ...
-

XBD-2431 24v kiçi göwrümli we ýokary tizlikli elektrik...
-

28mm 4-20W kiçi kuwwatly özeksiz gymmatbaha metal ...
-
XBD-2022 DC motory özeksiz motor 6v tatuirovka galamy m...
-

Gowy hilli XBD-1718 seýrek metal çotkaly motor ...