



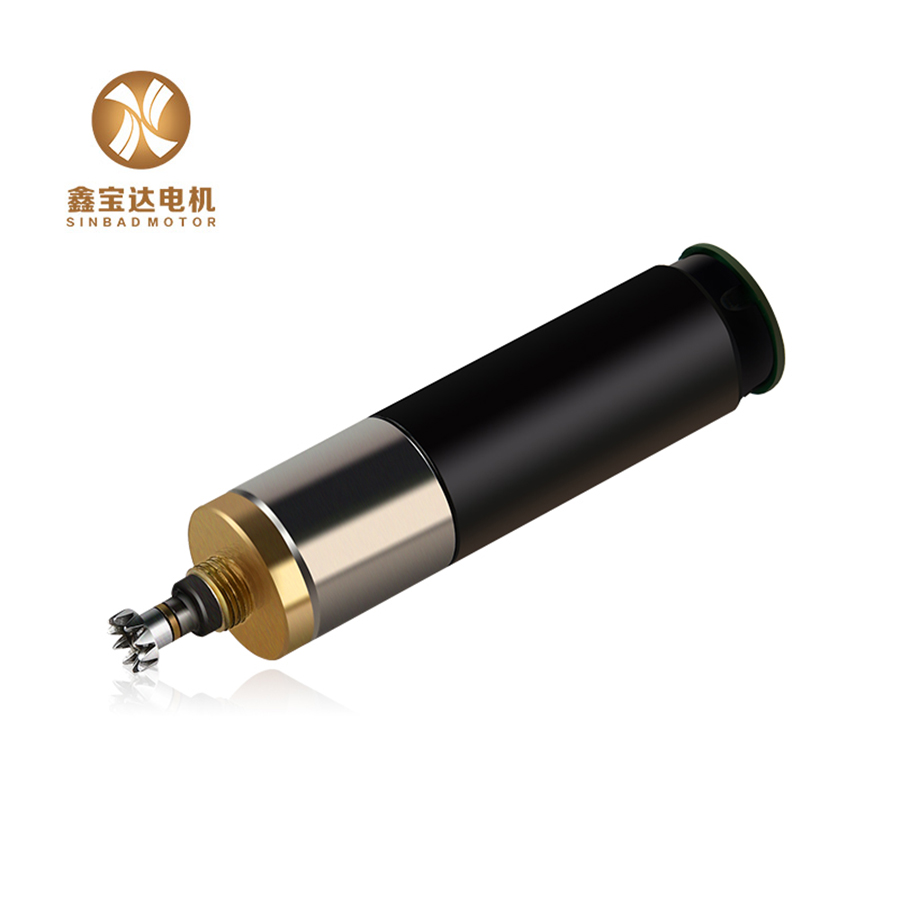
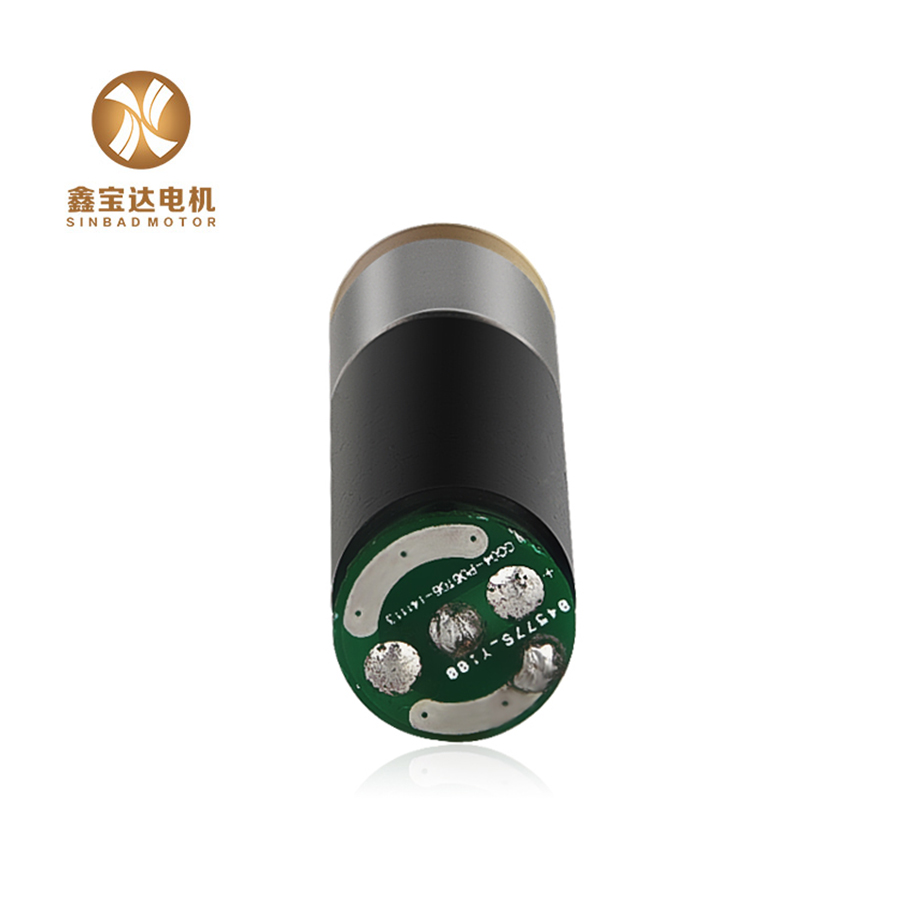
XBD-1331 Gymmat metal çotga DC motor
Önümiň tanyşdyrylyşy
XBD-1331 Gymmat metal çotga DC motor, dürli programmalarda ýokary öndürijilik üpjün etmek üçin döredilen ýokary öndürijilikli hereketlendiriji. Onda ýokary çeýe hereketlendirijilerden has ýokary RPM-de işlemäge mümkinçilik berýän ýokary tizlikli ýadro dizaýny bar, bu tizlik we tork möhüm bolan programmalar üçin amatly bolýar. Şeýle hem hereketlendiriji ýokary kuwwatly çykyş edip, robotda, kiçi dronlarda we ýokary tork talap edilýän beýleki programmalarda ulanmak üçin amatly bolýar. Motor şeýle hem ýokary çydamly we dürli şertlere çydap bilýär we ony kyn şertlerde ulanmak üçin amatly edýär.
Arza
Sinbad ýadrosyz hereketlendiriji, robotlar, pilotsyz uçarlar, lukmançylyk enjamlary, awtoulaglar, maglumat we aragatnaşyk, elektrik gurallary, gözellik enjamlary, takyk gurallar we harby senagat ýaly köp sanly amaly ulanýar.










Üstünlik
XBD-1331 Gymmat metal çotga DC motor aşakdaky artykmaçlyklary hödürleýär:
1.
2. torokary tork: Düşnüksiz çotga DC hereketlendirijileri, dizaýny sebäpli ýokary tork çykaryjy bolup, olary ýokary tork talap edýän programmalar üçin ideal edýär.
3. efficiencyokary netijelilik: Düwürtiksiz çotga DC hereketlendirijileri hem ýokary netijelilige eýe, ýagny berlen güýjüň köpüsini ulanyp boljak işe öwrüp bilerler.
4. Arzan bahasy: Düwürtikli çotga DC hereketlendirijileri gaty arzan, bu bolsa býudjetden peýdalanýan programmalar üçin gowy saýlama bolýar.
5.
Parametr
| Motor modeli 1331 | |||||
| Gymmat bahaly metal çotga | |||||
| Nominalda | |||||
| Nominal naprýa .eniýe | V | 3 | 6 | 12 | 24 |
| Nominal tizlik | rpm | 9600 | 8800 | 9280 | 12960 |
| Nominal tok | A | 0.9 | 0.5 | 0.2 | 0.4 |
| Nominal tork | mNm | 2.1 | 2.4 | 2.0 | 4.1 |
| Mugt ýük | |||||
| Loadük tizligi ýok | rpm | 12000 | 11000 | 11600 | 16200 |
| Loadük ýok | mA | 45.0 | 30.0 | 18.0 | 12.0 |
| Iň ýokary netijelilikde | |||||
| Iň ýokary netijelilik | % | 80.8 | 75.8 | 69.4 | 70.5 |
| Tizlik | rpm | 10920 | 9735 | 9918 | 13932 |
| Häzirki | A | 0.4 | 0.3 | 0.2 | 0.3 |
| Tork | mNm | 0.9 | 1.4 | 1.5 | 3.7 |
| Iň ýokary çykyş güýji | |||||
| Iň ýokary çykyş güýji | W | 3.2 | 3.5 | 3.1 | 11.1 |
| Tizlik | rpm | 6000 | 5500 | 5800 | 8100 |
| Häzirki | A | 2.22 | 1.22 | 0.56 | 0.77 |
| Tork | mNm | 5.1 | 6.0 | 5.0 | 10.5 |
| Dükanda | |||||
| Tok toguny | A | 4.40 | 2.40 | 1.08 | 1.57 |
| Duralga momenti | mNm | 10.3 | 12.1 | 10.1 | 21.0 |
| Motor yzygiderliligi | |||||
| Terminalyň garşylygy | Ω | 0.68 | 2.50 | 11.11 | 12.31 |
| Terminal induksion | mH | 0.05 | 0.12 | 0.27 | 0.75 |
| Tork hemişelik | mNm / A. | 2.36 | 5.12 | 9.60 | 13.78 |
| Tizlik hemişelik | rpm / V. | 4000.0 | 1833.3 | 966.7 | 675.0 |
| Tizlik / Tork hemişelik | rpm / mNm | 1166.1 | 910.0 | 1150.3 | 618.5 |
| Mehaniki wagt hemişelik | ms | 8.0 | 6.2 | 7.9 | 4.2 |
| Rotor inersiýasy | g ·cm² | 0.65 | 0.65 | 0.65 | 0.65 |
| Polýus jübütleriniň sany 1 | |||||
| 5-nji tapgyryň sany | |||||
| Motoryň agramy | g | 20 | |||
| Adaty ses derejesi | dB | ≤38 | |||
Nusgalar

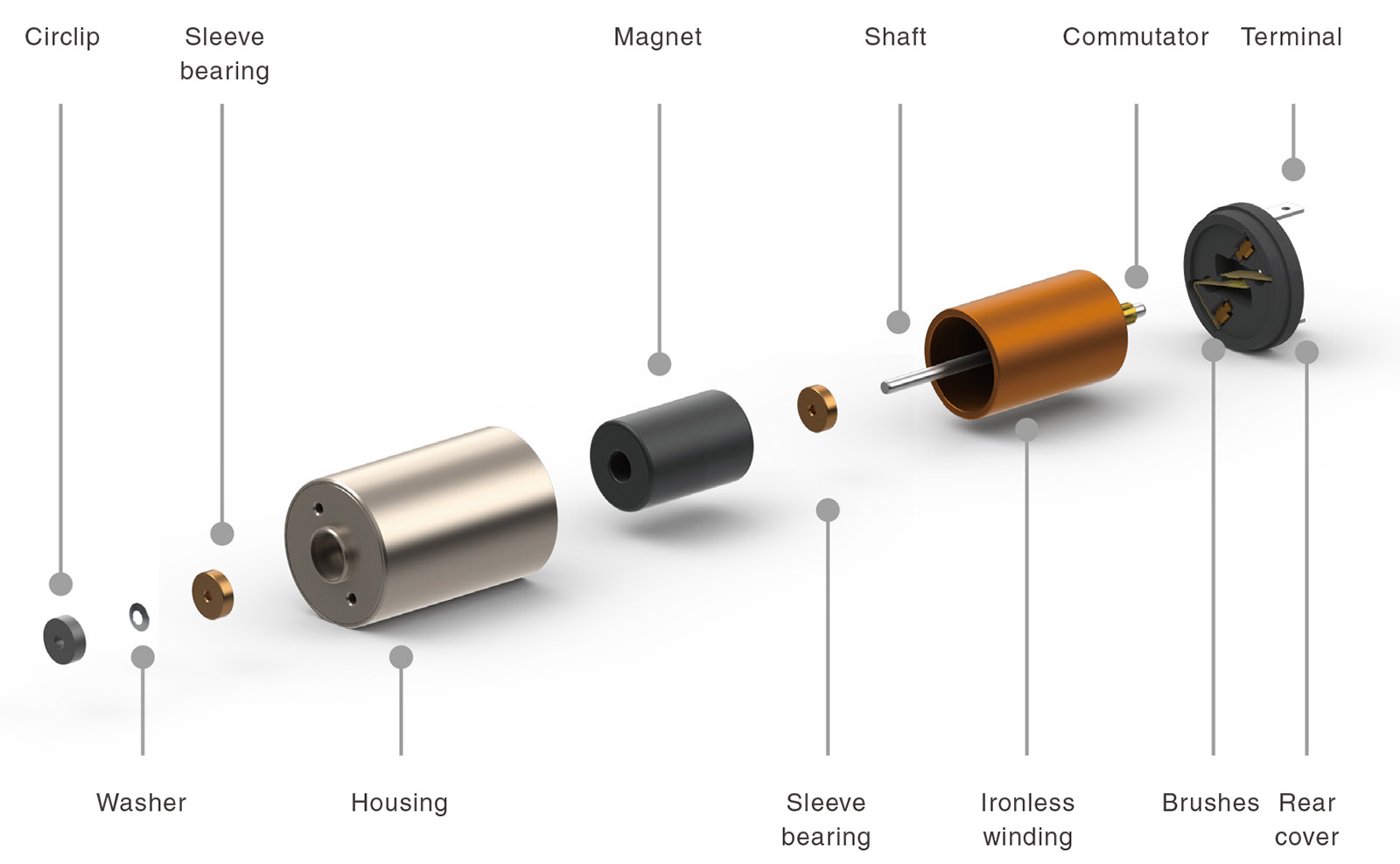
Gurluşlar
Sorag-jogap
J: Hawa. 2011-nji ýyldan bäri Coreless DC Motor-da ýöriteleşen öndüriji.
J: Bizde QC topary TQM-e laýyk gelýär, her ädim standartlara laýyk gelýär.
J: Adatça MOQ = 100pcs. Emma kiçi partiýa 3-5 bölek kabul edilýär.
J: Mysal size elýeterlidir. jikme-jiklikler üçin biziň bilen habarlaşmagyňyzy haýyş edýäris. Nusga tölegini alanymyzdan soň, özüňizi aňsat duýuň, köpçülikleýin sargyt bereniňizde yzyna gaýtarylar.
J: bize gözleg iberiň → sitatamyzy alyň → gepleşikler jikme-jiklikleri → nusgany tassyklaň → şertnama gol çekiň / goýum → köpçülikleýin önümçilik → ýük taýýar → balans / gowşuryş → mundan beýläkki hyzmatdaşlyk.
J: Eltip bermek wagty sargyt eden mukdaryňyza bagly, adatça 30 ~ 45 senenama güni gerek.
J: T / T-ni öňünden kabul edýäris. Şeýle hem, ABŞ-ly gurjak ýa-da RMB we ş.m. ýaly pul almak üçin dürli bank hasabymyz bar.
J: T / T, PayPal tarapyndan tölegi kabul edýäris, beýleki töleg usullary hem kabul edilip bilner, Beýleki töleg usullary bilen tölemezden ozal biziň bilen habarlaşyň. Şeýle hem 30-50% goýum bar, galyndy pul iberilmezden öň tölenmeli.
-
Torokary torkly DC elektrik motorly uglerod çotgasynyň ýadrosy ...
-
17mm Mini çotga dc motory dr üçin kiçijik ýadrosy ...
-
XBD-1625 12V BLDC Motor Coreless Robot Fr ...
-

XBD-1928 gyzgyn suw nasosy foshan awtoulag guýusy moto ...
-
Gowy hilli XBD-2230 uglerod çotgasy dc motor min ...
-
XBD-1640 DC Coreless Motor 6V 9V 12V 24V 27600r ...