



XBD-2642 Gymmat metal çotga DC motor
Önümiň tanyşdyrylyşy
XBD-2642 Gymmat metal çotga DC motor ýokary öndürijilikli we ygtybarly hereketlendiriji bolup, köp sanly amaly üçin amatly. Motorda ýokary geçirijilik we gymmatly metal çotgalary bar, bu bolsa netijeli we ygtybarly öndürijilige sebäp bolýar. Torokary tork çykarylyşy bilen hereketlendiriji talaplary ýerine ýetirmek üçin takyk gözegçiligi we artýan güýji üpjün edýär. Motor, sessiz we asuda işleýär, seslere duýgur gurşaw üçin amatly edýär. Motoryň ykjam we ýeňil dizaýny dürli ulgamlara aňsat birleşmäge mümkinçilik berýär. Motoryň berkligi we ygtybarlylygyny üpjün edýän uzak ömri bar. Mundan başga-da, hereketlendiriji aýratyn talaplara laýyklaşdyrylyp bilner. Şeýle hem XBD-2642 hereketlendirijisi, hereketlendirijiniň öndürijiligini ýokarlandyrmak üçin toplumlaýyn dişli guty we kodlaýjy wariantlary hödürleýär.
Arza
Sinbad ýadrosyz hereketlendiriji, robotlar, pilotsyz uçarlar, lukmançylyk enjamlary, awtoulaglar, maglumat we aragatnaşyk, elektrik gurallary, gözellik enjamlary, takyk gurallar we harby senagat ýaly köp sanly amaly ulanýar.










Üstünlik
XBD-2642 Gymmat metal çotga DC motorynyň artykmaçlyklary aşakdakylar:
1. performanceokary öndürijilik we ygtybarlylyk.
2. Ajaýyp elektrik geçirijiligi we gymmat bahaly metal çotgalary, ýokary netijeliligi we ygtybarlylygy üpjün edýär.
3. Takyk gözegçilik we güýji ýokarlandyrmak funksiýasyny üpjün edýän ýokary tork çykyşy.
4. Smoothumşak işlemek, pes ses, ses duýgur gurşaw üçin amatly.
5. Ykjam we ýeňil dizaýn, dürli ulgamlara birleşdirmek aňsat.
6. Uzak hyzmat ömri, berkligi we ygtybarlylygy üpjün etmek.
7. specificörite programma talaplaryna laýyklykda düzülip bilner.
8. Motoryň işleýşini ýokarlandyrmak üçin toplumlaýyn dişli gutular we kodlaýjylar üçin mümkinçilikleri hödürleýär.
Parametr
| Motor modeli 2642 | |||||
| Gymmat bahaly metal çotga | |||||
| Nominalda | |||||
| Nominal naprýa .eniýe | V | 6 | 9 | 12 | 24 |
| Nominal tizlik | rpm | 4895 | 7476 | 7452 | 7700 |
| Nominal tok | A | 0.44 | 0.64 | 0.43 | 0.39 |
| Nominal tork | mNm | 4.01 | 5.97 | 5.44 | 9.25 |
| Mugt ýük | |||||
| Loadük tizligi ýok | rpm | 5500 | 8400 | 8100 | 8800 |
| Loadük ýok | mA | 50 | 50 | 45 | 30 |
| Iň ýokary netijelilikde | |||||
| Iň ýokary netijelilik | % | 77.8 | 81.7 | 81.7 | 80.7 |
| Tizlik | rpm | 5033 | 7686 | 7412 | 8008 |
| Häzirki | A | 0.352 | 0.505 | 0.458 | 0.288 |
| Tork | mNm | 3.1 | 4.6 | 5.8 | 6.7 |
| Iň ýokary çykyş güýji | |||||
| Iň ýokary çykyş güýji | W | 5.3 | 11.9 | 14.4 | 17.0 |
| Tizlik | rpm | 2750 | 4200 | 4050 | 4400 |
| Häzirki | A | 1.8 | 2.7 | 2.5 | 1.5 |
| Tork | mNm | 18.2 | 27.1 | 34.0 | 37.0 |
| Dükanda | |||||
| Tok toguny | A | 3.60 | 5.40 | 4.90 | 2.90 |
| Duralga momenti | mNm | 36.5 | 54.2 | 68.1 | 74.0 |
| Motor yzygiderliligi | |||||
| Terminalyň garşylygy | Ω | 1.67 | 1.67 | 2.45 | 8.28 |
| Terminal induksion | mH | 0.062 | 0.070 | 0.160 | 0.290 |
| Tork hemişelik | mNm / A. | 10.27 | 10.14 | 14.02 | 25.77 |
| Tizlik hemişelik | rpm / V. | 916.7 | 933.3 | 675.0 | 366.7 |
| Tizlik / Tork hemişelik | rpm / mNm | 150.8 | 154.9 | 119.0 | 119.0 |
| Mehaniki wagt hemişelik | ms | 9.11 | 7.68 | 5.90 | 5.79 |
| Rotor inersiýasy | g ·cm² | 5.77 | 4.73 | 4.73 | 4.65 |
| Polýus jübütleriniň sany 1 | |||||
| 7-nji tapgyryň sany | |||||
| Motoryň agramy | g | 105 | |||
| Adaty ses derejesi | dB | ≤40 | |||
Nusgalar
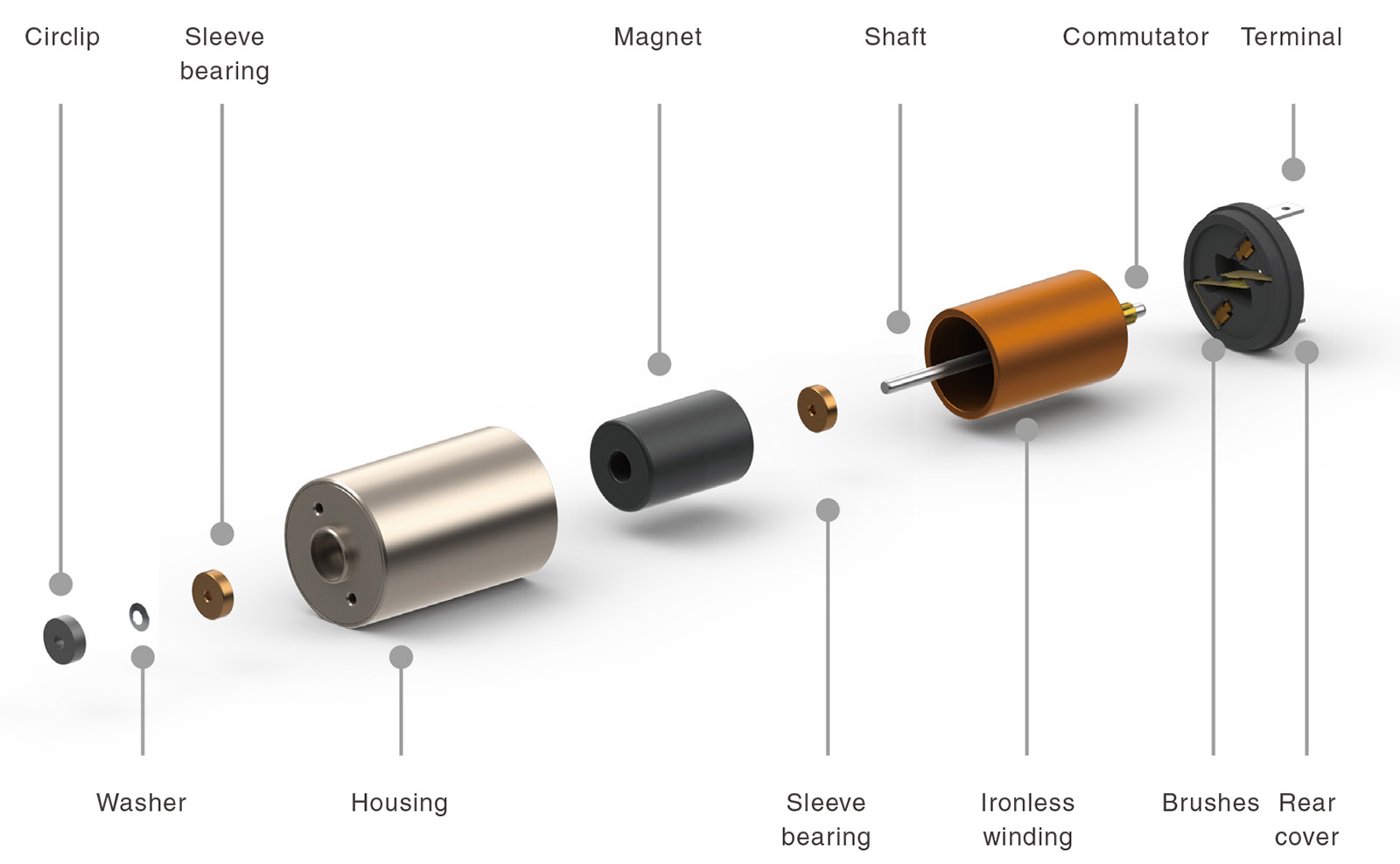
Gurluşlar
Sorag-jogap
J: Hawa. 2011-nji ýyldan bäri Coreless DC Motor-da ýöriteleşen öndüriji.
J: Bizde QC topary TQM-e laýyk gelýär, her ädim standartlara laýyk gelýär.
J: Adatça MOQ = 100pcs. Emma kiçi partiýa 3-5 bölek kabul edilýär.
J: Mysal size elýeterlidir. jikme-jiklikler üçin biziň bilen habarlaşmagyňyzy haýyş edýäris. Nusga tölegini alanymyzdan soň, özüňizi aňsat duýuň, köpçülikleýin sargyt bereniňizde yzyna gaýtarylar.
J: bize gözleg iberiň → sitatamyzy alyň → gepleşikler jikme-jiklikleri → nusgany tassyklaň → şertnama gol çekiň / goýum → köpçülikleýin önümçilik → ýük taýýar → balans / gowşuryş → mundan beýläkki hyzmatdaşlyk.
J: Eltip bermek wagty sargyt eden mukdaryňyza bagly. köplenç 30 ~ 45 senenama güni gerek.
J: T / T-ni öňünden kabul edýäris. Şeýle hem, ABŞ-ly gurjak ýa-da RMB we ş.m. ýaly pul almak üçin dürli bank hasabymyz bar.
J: T / T, PayPal tarapyndan tölegi kabul edýäris, beýleki töleg usullary hem kabul edilip bilner, Beýleki töleg usullary bilen tölemezden ozal biziň bilen habarlaşyň. Şeýle hem 30-50% goýum bar, galyndy pul iberilmezden öň tölenmeli.
Qualityokary hilli öndürijilik
Düşnüksiz çotga DC hereketlendirijileri gaty gowy ýerine ýetirýärler. Motor pes ses we yrgyldy bilen rahat işleýär. Mundan başga-da, hereketlendirijiniň ýokary tork çykarylyşy ýokary hilli öndürijiligi üpjün edýär we robot, awtomatlaşdyryş, lukmançylyk enjamlary we howa giňişliginde takyk programmalar üçin amatly bolýar.
Uzak ömür
Düwürtiksiz çotga DC motorynyň ömri uzak. Motor çalt könelmän uzak wagtlap işlemek üçin niýetlenendir. Mundan başga-da, hereketlendirijiniň pes ýylylyk öndürijisi motoryň ömrüni uzaldýar we birnäçe ýyllap üznüksiz işlemegi talap edýän möhüm programmalar üçin amatly edýär.
Sözümiň ahyrynda
Düwürtiksiz çotga DC hereketlendirijileri takyk hereketi, pes inersiýany, ýokary güýç-agram derejesini we netijeli işlemegi talap edýän ýokary öndürijilikli programmalar üçin ajaýyp çözgütdir. Ykjam ululygy, ýeňil dizaýny we pes ýylylyk öndürmegi bilen, ýadrosyz çotga DC hereketlendirijileri awtoulag pudagyny özgertdi.
Şonuň üçin ygtybarly, täsirli we ýokary öndürijilikli hereketlendiriji gözleýän bolsaňyz, programmaňyz üçin ýadrosyz çotga DC motoryny ulanmagy göz öňünde tutuň.
-
XBD-2642 Ösen elektrik 16mm ýadrosyz motor ...
-
XBD-2030 Ykjam ýadrosyz çotga DC motory ...
-

XBD-1320 iň oňat bahada çotgaly motor ...
-
Torokary torkly DC elektrik motorly uglerod çotgasynyň ýadrosy ...
-
17mm Mini çotga dc motory dr üçin kiçijik ýadrosy ...
-
XBD-2230 Zawodyň bahasy Öý hojalygynyň hemişelik magnit ...