




Elektrikli burgular üçin ýokary tizlikli çotkasyz DC mikro tatu tabanjasy motory XBD-1656 diş elektrik motory
Önümiň tanyşdyrylyşy
XBD-1656 Özeksiz Çotgasyz DC Motory, ýeriň çäkli bolan ýerlerinde ulanmak üçin ýörite döredilen ýokary öndürijilikli motordyr. Motoryň kiçi, takyk ulanylýan ýerlerde ulanmak üçin amatly bolan ykjam, özeksiz dizaýny bar. Çotgasyz dizaýny bilen bu motor däp bolan çotgaly motorlara garanyňda has ýokary netijeliligi we has uzak ömürliligi hödürleýär.
Şeýle hem, ol ýokary moment çykaryşyny üpjün edýär, bu bolsa takyk dolandyryşy we işlemegi üpjün edýär. Mundan başga-da, motoryň titreme profili pes, bu bolsa iş wagtynda has ýokary durnuklylygy we takyklygy üpjün edýär.
Dürli ulanylyşlaryň anyk talaplaryny kanagatlandyrmak üçin, XBD-1656 dürli sargy, reduktor we kodlaýjy opsiýalary bilen sazlanyp bilner. Bu bolsa, hereketlendirijiniň konfigurasiýasynda ajaýyp çeýeligi üpjün edýär we hereketlendirijiniň üstünlikli ulanylyş üçin zerur bolan takyk tehniki şertlere laýyk gelmegini üpjün edýär.
Artykmaçlyk
XBD-1656 Coreless Fırçasyz DC Motorynyň artykmaçlyklary aşakdakylary öz içine alýar:
1. Ýer çäkli bolan ýerlerde ulanylýan örän kiçi ölçegler.
2. Ýumşak we sessiz işlemek üçin özeksiz dizaýn
3. Has netijeli we uzak ömür üçin çotgasyz dizaýn.
4. Takyk gözegçilik we öndürijilik üçin ýokary moment çykyşy
5. Has ýokary durnuklylyk we takyklyk üçin pes titreme
- Dürli ulanylyşlaryň aýratyn talaplaryna laýyk gelmek üçin dürli sargy, reduktor we kodlaýjy opsiýalary bilen sazlanyp bilner.
Programma
Sinbad ýadrosyz motory robotlar, dronlar, lukmançylyk enjamlary, awtoulaglar, maglumat we aragatnaşyk, elektrik gurallary, gözellik enjamlary, takyk gurallar we harby senagat ýaly giň ulanylyş ugurlaryna eýedir.










Parametr
| 1656-njy modeldäki motor | ||||||
| Nominal derejede | ||||||
| Nominal naprýaženiýe | V | 12 | 18 | 24 | 36 | 48 |
| Nominal tizlik | aýlanma/minut | 37613 | 41153 | 40800 | 36935 | 38275 |
| Nominal tok | A | 6.01 | 5.17 | 5.04 | 3.74 | 2.96 |
| Nominal moment | mNm | 14.54 | 17.53 | 22.51 | 27.03 | 27.38 |
| Mugt ýük | ||||||
| Ýüksüz tizlik | aýlanma/minut | 42500 | 46500 | 48000 | 44500 | 46114 |
| Ýüksüz tok | mA | 550 | 380 | 285 | 210 | 175 |
| Maksimum netijelilikde | ||||||
| Maksimum netijelilik | % | 79.7 | 81.9 | 82.0 | 81.0 | 80.5 |
| Tizlik | aýlanma/minut | 38888 | 42548 | 43440 | 40273 | 41733 |
| Häzirki | A | 4.583 | 3.918 | 3.298 | 2.185 | 1.731 |
| Moment | mNm | 10.8 | 12.96 | 14.26 | 15.11 | 15.30 |
| Maksimum çykyş kuwwatynda | ||||||
| Maksimum çykyş güýji | W | 140.7 | 185.6 | 188.6 | 185.2 | 194.0 |
| Tizlik | aýlanma/minut | 21250 | 23250 | 24000 | 22250 | 23057 |
| Häzirki | A | 24.3 | 21.2 | 16.1 | 10.6 | 8.0 |
| Moment | mNm | 63.20 | 76.23 | 75.04 | 79.50 | 80.52 |
| Saklama ýerinde | ||||||
| Duralga tok | A | 48.00 | 42.00 | 32.00 | 21.00 | 16.55 |
| Duralga momenti | mNm | 126.50 | 152.46 | 150.08 | 159.00 | 161.04 |
| Motoryň sabitleri | ||||||
| Terminalyň garşylygy | Ω | 0.25 | 0.43 | 0.75 | 1.71 | 2.90 |
| Terminal induktiwligi | mH | 0.012 | 0.023 | 0.041 | 0.081 | 0.180 |
| Moment sabiti | mNm/A | 2.67 | 3.66 | 4.73 | 7.65 | 9.80 |
| Tizlik sabiti | aýlanma/V | 3542 | 2583 | 2000-nji ýyl | 1236-njy ýyl | 961 |
| Tizlik/Moment sabiti | aýlanma/mNm | 336.0 | 305.0 | 319.8 | 279.9 | 286.3 |
| Mehaniki wagt sabiti | ms | 3.80 | 3.45 | 3.62 | 3.17 | 3.24 |
| Rotor inersiýasy | g·cm² | 1.08 | 1.08 | 1.08 | 1.08 | 1.08 |
| Polýus jübütleriniň sany 1 | ||||||
| 3-nji fazanyň sany | ||||||
| Motoryň agramy | g | 34 | ||||
| Adaty ses derejesi | dB | ≤45 | ||||
Nusgalar

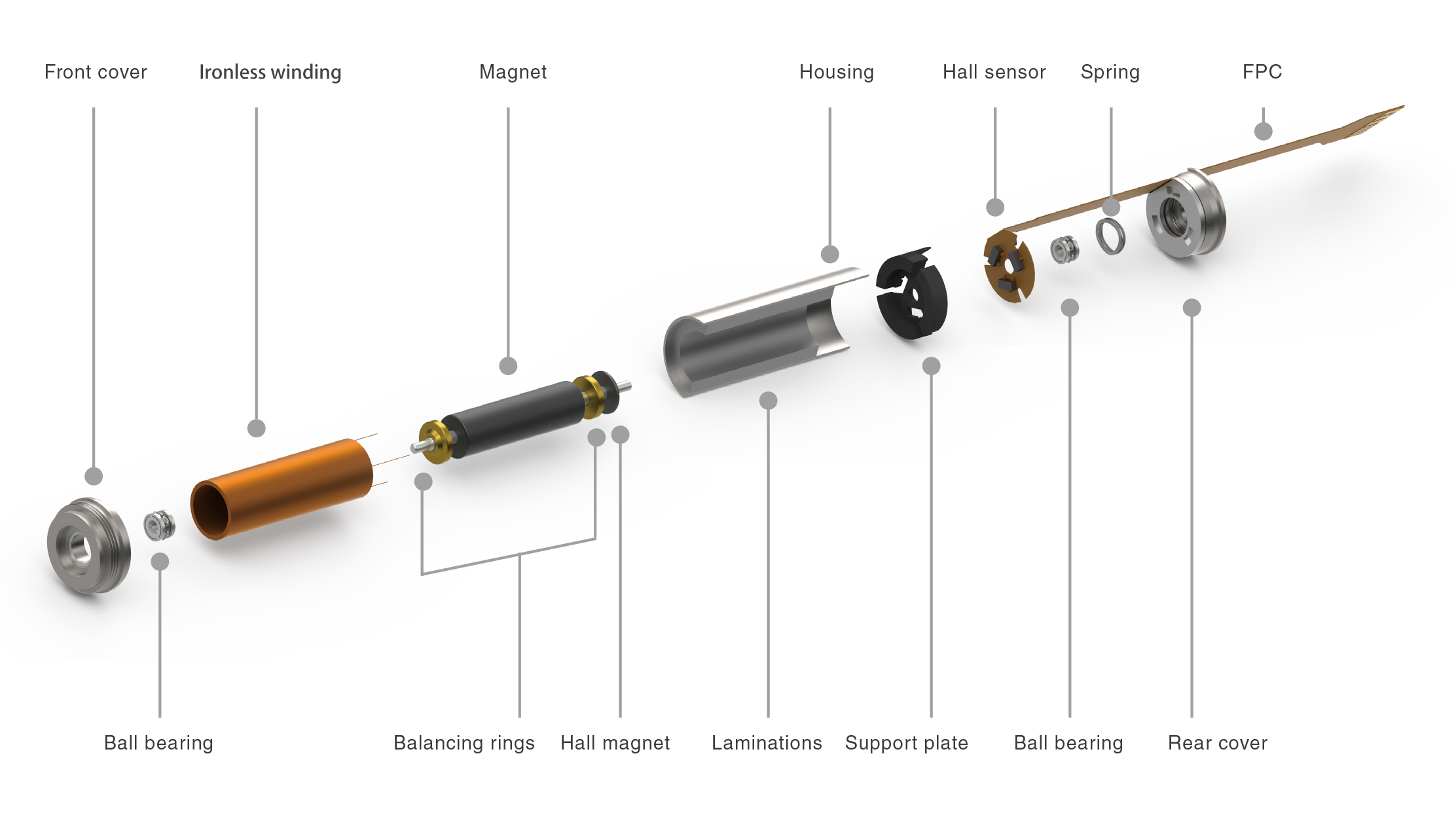
Gurluşlar
Köp soralýan soraglar
A: Hawa. Biz 2011-nji ýyldan bäri özelsiz DC motoryna ýöriteleşen önüm öndüriji.
A: Bizde QC topary TQM-e laýyk gelýär, her ädim standartlara laýyk gelýär.
A: Adatça, MOQ = 100 sany. Ýöne kiçi partiýaly 3-5 sany kabul edilýär.
A: Nusga siziň üçin elýeterlidir. Jikme-jik maglumat üçin biziň bilen habarlaşyň. Sizden nusga tölegini alanymyzdan soň, özüňizi rahat duýuň, köpçülikleýin sargyt edeniňizde puluňyz yzyna gaýtarylar.
A: bize sorag iberiň → teklibimizi alyň → jikme-jiklikleri gepleşik ediň → nusgany tassyklaň → şertnama/goýum gol çekiň → köpçülikleýin önümçilik → ýük taýýar → balans/eltip bermek → mundan beýläk hyzmatdaşlyk ediň.
A: Eltip bermek wagty sargyt eden mukdaryňyza baglydyr. Adatça 30 ~ 45 senenama güni gerek bolýar.
A: Biz T/T-ni öňünden kabul edýäris. Şeýle hem, ABŞ dollary ýa-da RMB ýaly pul almak üçin dürli bank hasaplarymyz bar.
A: Biz tölegleri T/T, PayPal arkaly kabul edýäris, beýleki töleg usullary hem kabul edilip bilner, beýleki töleg usullary bilen tölemezden öň biziň bilen habarlaşyň. Şeýle hem 30-50% öňünden töleg bar, galan pul ibermezden öň tölenmeli.
Özeksiz çotgasyz DC motorlary däp bolan DC motorlaryna garanyňda birnäçe artykmaçlyklary hödürleýär. Bu artykmaçlyklaryň käbiri:
1. Netijeli
Özensiz çotgasyz DC motorlary, çotgasyz bolandygy üçin netijeli maşynlardyr. Bu, olaryň mehaniki kommutasiýa üçin çotgalara bil baglamaýandygyny, sürtülmäni azaldýandygyny we ýygy-ýygydan tehniki hyzmata zerurlygy aradan aýyrýandygyny aňladýar. Bu netijelilik, özensiz çotgasyz DC motorlaryny ýokary öndürijilikli we az energiýa sarp edilişini talap edýän dürli ulanyşlar üçin ideal edýär.
2. Kompakt dizaýn
Özeksiz BLDC motorlary kiçi we ýeňil motorlary talap edýän dürli ulanyşlar üçin amatlydyr. Motorlaryň ýeňil häsiýeti olary agrama duýgur enjamlar bilen baglanyşykly ulanyşlar üçin amatly edýär. Bu ykjam dizaýn esasy aýratynlyk bolup, ony awiakosmos, lukmançylyk we robototehnika ýaly pudaklar üçin amatly edýär.
3. Pes sesli işleýiş
Özelsiz çotgasyz DC motorlary minimal ses bilen işlemek üçin niýetlenendir. Motor kommutasiýa üçin çotgalary ulanmaýandygy sebäpli, adaty motorlara garanyňda az mehaniki ses çykarýar. Motoryň sessiz işlemegi ony dürli ulanyşlar üçin ajaýyp saýlaw edýär. Mundan başga-da, Özelsiz BLDC motorlary artykmaç ses çykarman örän ýokary tizlikde işläp bilýär, bu bolsa olary ýokary tizlikli ulanyşlar üçin amatly edýär.
4. Ýokary takyklykly gözegçilik
Özeksiz BLDC motorlary ajaýyp tizlik we moment gözegçiligini üpjün edýär, bu bolsa olary ýokary takyklykly iş talap edýän ulanyşlar üçin ajaýyp saýlawa öwürýär. Bu takyk gözegçilik, motoryň dolandyryjysyna seslenme berýän ýapyk aýlawly dolandyryş ulgamyny ulanmak arkaly amala aşyrylýar, bu bolsa onuň tizligi we momenti ulanyş zerurlyklaryna laýyklykda sazlamaga mümkinçilik berýär.
5. Uzak ömür
Adaty DC motorlary bilen deňeşdirilende, özensiz çotgasyz DC motorlarynyň hyzmat möhleti has uzakdyr. Özensiz çotgasyz DC motorynda çotgalaryň ýoklugy çotgalaryň kommutasiýa bilen baglanyşykly aşynmagy we ýyrtylmagyny azaldýar. Mundan başga-da, özensiz çotgasyz DC motorlary ýapyk aýlawly dolandyryş ulgamyna daýanýar we däp bolan DC motorlaryna garanyňda näsazlyga has az sezewar bolýar. Bu uzadylan hyzmat möhleti özensiz çotgasyz DC motorlaryny ýokary ygtybarlylyk üçin ajaýyp saýlawa öwürýär.
Netijede
Özeksiz BLDC motorlary däp bolan DC motorlaryna garanyňda ajaýyp artykmaçlyklary we artykmaçlyklary hödürleýär. Bu artykmaçlyklara ýokary netijelilik, ykjam dizaýn, sessiz işleýiş, ýokary takyklykly dolandyryş we uzak hyzmat möhleti girýär. Özeksiz çotgasyz DC motorlarynyň artykmaçlyklary bilen olar robototehnika, awiakosmos, lukmançylyk enjamlary we awtomatlaşdyrma ýaly dürli pudaklarda dürli ulanyşlar üçin amatlydyr.