




XBD-3660 BLDC dişli guty servo motor kontrolleýjisi matlab programmalary pyýada ýörelgesini ulanýar
Önümiň tanyşdyrylyşy
XBD-3660 Coreless Brushless DC Motor, ýokary öndürijilikli hereketlendiriji bolup, müşderileriň aýratyn talaplaryny kanagatlandyryp bolýar. Onuň düýpsiz gurluşy we çotgasyz dizaýny rahat işlemegi üpjün edýär, dykylmagyny azaldýar we uzak ömri ýokarlandyrýar. Bu hereketlendiriji, dürli programmalaryň isleglerini kanagatlandyrmak üçin dürli tizlikde we kuwwat çykyşlarynda işlemek üçin sazlanyp bilner. Mundan başga-da, müşderiler motoryň parametrlerini aýratyn talaplaryna we aýratynlyklaryna laýyklaşdyryp bilerler. Umuman aýdanyňda, XBD-3660 Coreless Brushless DC Motor, programmaňyzyň aýratyn talaplaryna laýyk gelýän köpugurly we ygtybarly motor.
Arza
Sinbad ýadrosyz hereketlendiriji, robotlar, pilotsyz uçarlar, lukmançylyk enjamlary, awtoulaglar, maglumat we aragatnaşyk, elektrik gurallary, gözellik enjamlary, takyk gurallar we harby senagat ýaly köp sanly amaly ulanýar.








Üstünlik
XBD-3660 Coreless Brushless DC Motor-yň artykmaçlyklary:
1. Düşnüksiz gurluşyk we çotgasyz dizaýn, rahat işlemegi we uzak ömri üpjün edýär.
2. Dykylmagynyň azalmagy umumy öndürijiligi gowulandyrýar.
3. Motoryň tizligi we kuwwat çykarylyşy, amaly talaplara laýyklaşdyrylyp bilner.
4. Çydamly dizaýn, hatda kyn şertlerde-de ygtybarly öndürijiligi üpjün edýär.
5. Aýry-aýry müşderileriň aýratynlyklaryna laýyk gelýän parametr parametrleri.
Düzülip bilinýän parametrler, naprýatageeniýe diapazony, Tizlik diapazony, kuwwat çykarylyşy, miliň diametri, hereketlendirijiniň uzynlygy we ş.m. ýaly müşderileriň aýratyn talaplaryna esaslanyp düzülip bilner.
Parametr
| Motor modeli 3660 | ||||
| Nominalda | ||||
| Nominal naprýa .eniýe | V | 12 | 24 | 36 |
| Nominal tizlik | rpm | 4463 | 4930 | 5100 |
| Nominal tok | A | 3.24 | 1.93 | 1.30 |
| Nominal tork | mNm | 64.12 | 69.36 | 66.71 |
| Mugt ýük | ||||
| Loadük tizligi ýok | rpm | 5250 | 5800 | 6000 |
| Loadük ýok | mA | 260 | 150 | 120 |
| Iň ýokary netijelilikde | ||||
| Iň ýokary netijelilik | % | 78.5 | 78.9 | 77.0 |
| Tizlik | rpm | 4725 | 5220 | 5340 |
| Häzirki | A | 2.244 | 1.335 | 0.987 |
| Tork | mNm | 42.70 | 46.24 | 48.92 |
| Iň ýokary çykyş güýji | ||||
| Iň ýokary çykyş güýji | W | 58.8 | 70.2 | 69.9 |
| Tizlik | rpm | 2625 | 2900 | 3000 |
| Häzirki | A | 10.2 | 6.1 | 4.1 |
| Tork | mNm | 213.70 | 231.20 | 222.36 |
| Dükanda | ||||
| Tok toguny | A | 20.10 | 12.00 | 8.00 |
| Duralga momenti | mNm | 427.40 | 462.39 | 444.72 |
| Motor yzygiderliligi | ||||
| Terminalyň garşylygy | Ω | 0.60 | 2.00 | 4.50 |
| Terminal induksion | mH | 0.260 | 0.945 | 2.055 |
| Tork hemişelik | mNm / A. | 21.54 | 39.02 | 56.44 |
| Tizlik hemişelik | rpm / V. | 437.5 | 241.7 | 166.7 |
| Tizlik / Tork hemişelik | rpm / mNm | 12.3 | 12.5 | 13.5 |
| Mehaniki wagt hemişelik | ms | 4.44 | 4.54 | 4.88 |
| Rotor inersiýasy | g ·cm² | 34.53 | 34.53 | 34.53 |
| Polýus jübütleriniň sany 1 | ||||
| 3-nji tapgyryň sany | ||||
| Motoryň agramy | g | 269 | ||
| Adaty ses derejesi | dB | ≤45 | ||
Nusgalar

Gurluşlar
Sorag-jogap
J: Hawa. 2011-nji ýyldan bäri Coreless DC Motor-da ýöriteleşen öndüriji.
J: Bizde QC topary TQM-e laýyk gelýär, her ädim standartlara laýyk gelýär.
J: Adatça MOQ = 100pcs. Emma kiçi partiýa 3-5 bölek kabul edilýär.
J: Mysal size elýeterlidir. jikme-jiklikler üçin biziň bilen habarlaşmagyňyzy haýyş edýäris. Nusga tölegini alanymyzdan soň, özüňizi aňsat duýuň, köpçülikleýin sargyt bereniňizde yzyna gaýtarylar.
J: bize gözleg iberiň → sitatamyzy alyň → gepleşikler jikme-jiklikleri → nusgany tassyklaň → şertnama gol çekiň / goýum → köpçülikleýin önümçilik → ýük taýýar → balans / gowşuryş → mundan beýläkki hyzmatdaşlyk.
J: Eltip bermek wagty sargyt eden mukdaryňyza bagly. köplenç 30 ~ 45 senenama güni gerek.
J: T / T-ni öňünden kabul edýäris. Şeýle hem, ABŞ-ly gurjak ýa-da RMB we ş.m. ýaly pul almak üçin dürli bank hasabymyz bar.
J: T / T, PayPal tarapyndan tölegi kabul edýäris, beýleki töleg usullary hem kabul edilip bilner, Beýleki töleg usullary bilen tölemezden ozal biziň bilen habarlaşyň. Şeýle hem 30-50% goýum bar, galyndy pul iberilmezden öň tölenmeli.
Düşnüksiz çotgasyz DC hereketlendirijileri: Tarazlary we peýdalary
Düşnüksiz çotgasyz DC hereketlendirijileri häzirki zaman robot we awtomatlaşdyryşda möhüm rol oýnaýar. Highokary netijelilik, ykjam dizaýn, ýeňil agram we asuda işlemek ýaly adaty hereketlendirijilerden köp artykmaçlyklary we artykmaçlyklary bolan örän ösen maşynlar.
Bu makalada, ýadrosyz çotgasyz DC hereketlendirijileriniň adaty hereketlendirijilerden artykmaçlyklary we peýdalary barada jikme-jik durup geçeris.
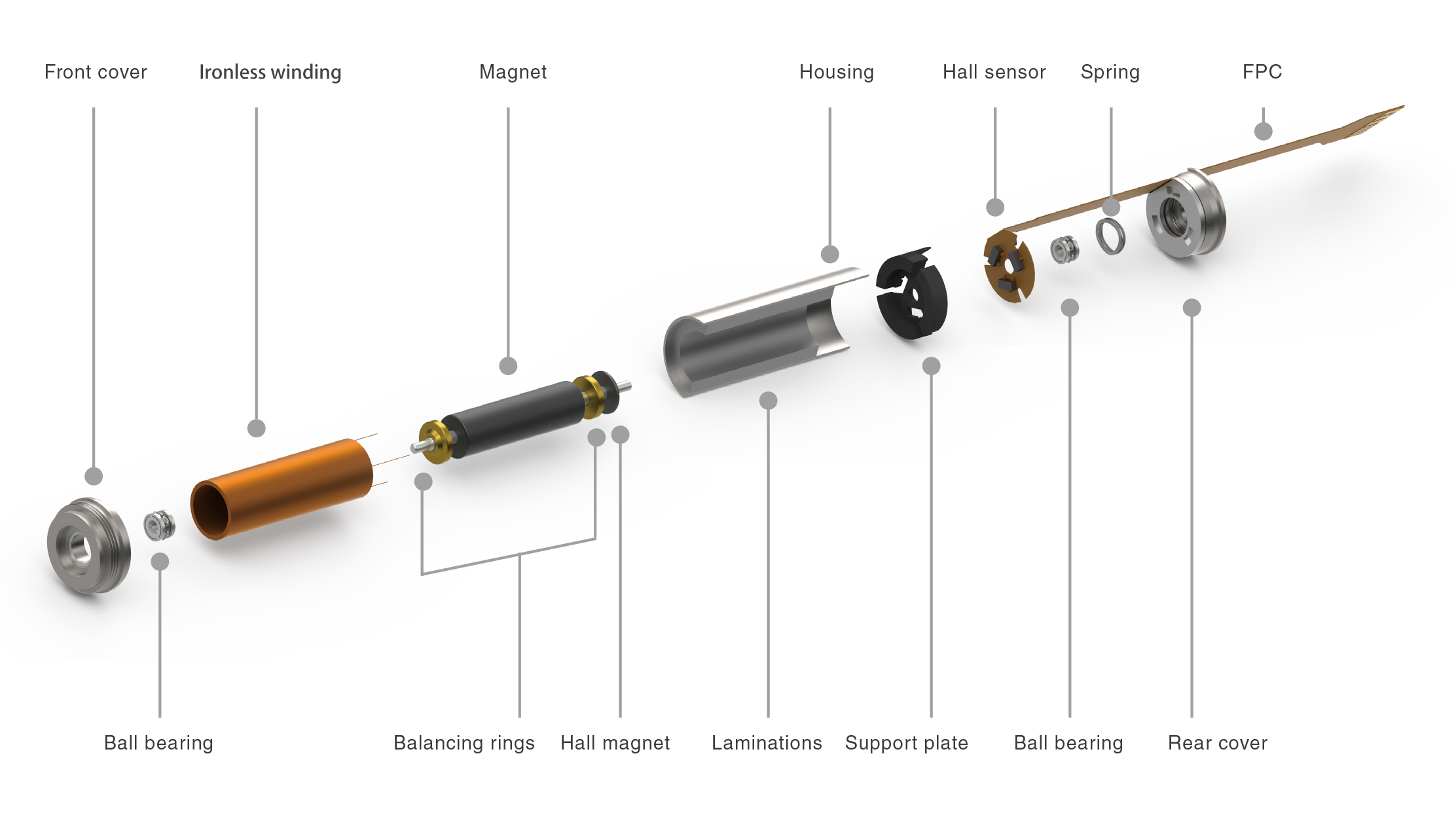
Coreless Brushless DC Motor näme?
Coreless Brushless DC Motor, elektromagnit ýörelgelerinde işleýän ýokary derejeli enjam. Bu hereketlendirijiler, adatça, robot, awtomatlaşdyryş we lukmançylyk enjamlary ýaly ýokary tizlikli programmalarda ulanylýar.
Demirsiz BLDC hereketlendirijisi, rotoryň içinde demir ýadrosy ýoklygy sebäpli adaty DC hereketlendirijisinden tapawutlanýar. Munuň ýerine motoryň rotory magnit meýdany bilen üpjün edýän we tork döredýän rulonlara örtülen mis simlerden durýar.
-
XBD-4088 çotgasyz bldc çotga çotgalary m ...
-
Diş üçin ýokary tizlikli çotgasyz DC motor XBD-2234 ...
-

Arzan bahasy XBD-3670 çotgasyz hereketlendiriji kontrol c ...
-

XBD-2059 çotgasyz DC motorly motorsyz motor tran ...
-
1636 Ölçeme enjamlary üçin çotgasyz DC motor
-
XBD-3090 çotgasyz motorly ýadrosyz motor 12 v dc ...