




XBD-2826 Gymmat metal çotga DC motor
Önümiň tanyşdyrylyşy
XBD-2826 Gymmat metal çotga DC DC ýokary öndürijilikli we ygtybarly hereketlendiriji bolup, ajaýyp elektrik geçirijiligi we gymmat bahaly metal çotgalary bilen işlenip, ýokary netijelilige we ygtybarlylyga sebäp bolýar. Takyk gözegçilik we güýji ýokarlandyrmak funksiýasyny üpjün edip, ýokary tork çykaryşyny hödürleýär. Bu hereketlendiriji rahat we asuda işleýär, ony ses duýgur ýerlerde ulanmak üçin amatly edýär. Onda dürli ulgamlara integrasiýany aňsatlaşdyrýan ykjam we ýeňil dizaýn bar. XBD-2826 uzak ömri, berkligini we ygtybarlylygyny üpjün edýär. Specificörite programma talaplaryna laýyklykda düzülip bilner we hereketlendirijiniň işleýşini ýokarlandyrmak üçin toplumlaýyn dişli gutular we kodlaýjylar üçin mümkinçilikler bar.
Arza
Sinbad ýadrosyz hereketlendiriji, robotlar, pilotsyz uçarlar, lukmançylyk enjamlary, awtoulaglar, maglumat we aragatnaşyk, elektrik gurallary, gözellik enjamlary, takyk gurallar we harby senagat ýaly köp sanly amaly ulanýar.










Üstünlik
XBD-2826 Gymmat metal çotga DC motorynyň artykmaçlyklary şulary öz içine alýar:
1. Ajaýyp elektrik geçirijiligi we gymmat bahaly metal çotgalary sebäpli ýokary öndürijilikli we ýokary netijelilik.
2. Takyk gözegçilik we güýji ýokarlandyrmak funksiýasyny üpjün edýän ýokary tork çykyşy.
3. noiseuwaş we asuda işlemek, seslere duýgur gurşaw üçin amatly etmek.
4. Dürli ulgamlara birikmegi aňsatlaşdyrýan ykjam we ýeňil dizaýn.
5. Uzak hyzmat ömri, berkligi we ygtybarlylygy üpjün etmek.
6. Aýratyn programma talaplaryna laýyklykda düzülip bilner.
7. Motoryň işleýşini ýokarlandyrmak üçin integral dişli gutular we kodlaýjylar üçin opsiýalar.
8. Senagat we sarp ediş programmalarynda ulanmak üçin amatly.
Parametr
| Motor modeli 2826 | ||||
| Gymmat bahaly metal çotga | ||||
| Nominalda | ||||
| Nominal naprýa .eniýe | V | 6 | 12 | 24 |
| Nominal tizlik | rpm | 3827 | 5429 | 5251 |
| Nominal tok | A | 0.08 | 0.18 | 0.09 |
| Nominal tork | mNm | 0.91 | 3.04 | 3.26 |
| Mugt ýük | ||||
| Loadük tizligi ýok | rpm | 4300 | 6100 | 5900 |
| Loadük ýok | mA | 10 | 14 | 8 |
| Iň ýokary netijelilikde | ||||
| Iň ýokary netijelilik | % | 76.6 | 81.6 | 80.8 |
| Tizlik | rpm | 3827 | 5551 | 5369 |
| Häzirki | A | 0.079 | 0.148 | 0.077 |
| Tork | mNm | 0.9 | 2.5 | 2.7 |
| Iň ýokary çykyş güýji | ||||
| Iň ýokary çykyş güýji | W | 0.9 | 4.4 | 4.6 |
| Tizlik | rpm | 2150 | 3050 | 2950 |
| Häzirki | A | 0.3 | 0.8 | 0.4 |
| Tork | mNm | 4.1 | 13.8 | 14.8 |
| Dükanda | ||||
| Tok toguny | A | 0.64 | 1.50 | 0.78 |
| Duralga momenti | mNm | 8.3 | 27.7 | 29.7 |
| Motor yzygiderliligi | ||||
| Terminalyň garşylygy | Ω | 9.38 | 8.00 | 30.77 |
| Terminal induksion | mH | 0.150 | 0.430 | 1.600 |
| Tork hemişelik | mNm / A. | 13.12 | 18.61 | 38.45 |
| Tizlik hemişelik | rpm / V. | 716.7 | 508.3 | 245.8 |
| Tizlik / Tork hemişelik | rpm / mNm | 520.4 | 220.6 | 198.8 |
| Mehaniki wagt hemişelik | ms | 30.65 | 19.22 | 16.39 |
| Rotor inersiýasy | g ·cm² | 5.62 | 8.32 | 7.88 |
| Polýus jübütleriniň sany 1 | ||||
| 7-nji tapgyryň sany | ||||
| Motoryň agramy | g | 78 | ||
| Adaty ses derejesi | dB | ≤38 | ||
Nusgalar

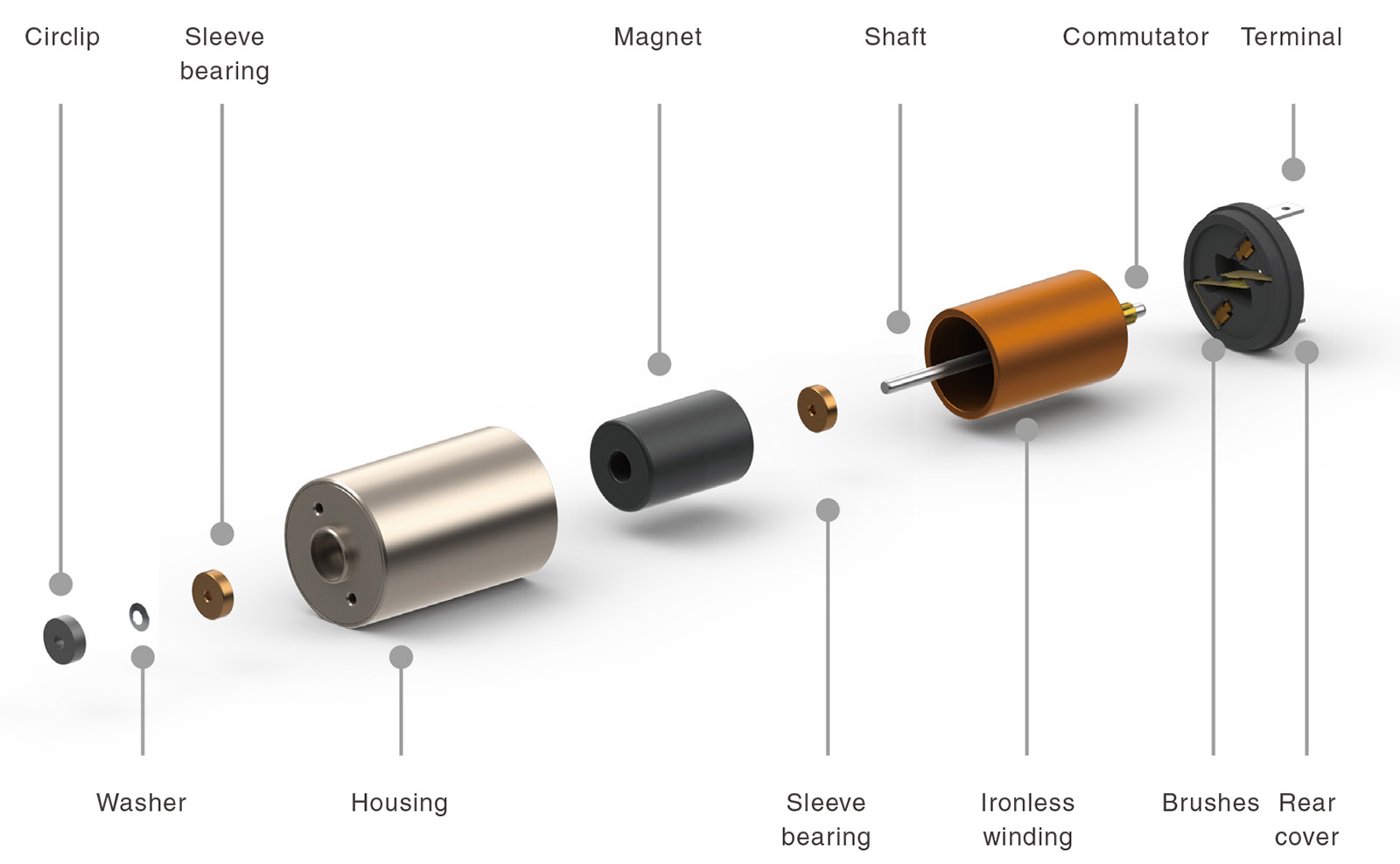
Gurluşlar
Sorag-jogap
J: Hawa. 2011-nji ýyldan bäri Coreless DC Motor-da ýöriteleşen öndüriji.
J: Bizde QC topary TQM-e laýyk gelýär, her ädim standartlara laýyk gelýär.
J: Adatça MOQ = 100pcs. Emma kiçi partiýa 3-5 bölek kabul edilýär.
J: Mysal size elýeterlidir. jikme-jiklikler üçin biziň bilen habarlaşmagyňyzy haýyş edýäris. Nusga tölegini alanymyzdan soň, özüňizi aňsat duýuň, köpçülikleýin sargyt bereniňizde yzyna gaýtarylar.
J: bize gözleg iberiň → sitatamyzy alyň → gepleşikler jikme-jiklikleri → nusgany tassyklaň → şertnama gol çekiň / goýum → köpçülikleýin önümçilik → ýük taýýar → balans / gowşuryş → mundan beýläkki hyzmatdaşlyk.
J: Eltip bermek wagty sargyt eden mukdaryňyza bagly. köplenç 30 ~ 45 senenama güni gerek.
J: T / T-ni öňünden kabul edýäris. Şeýle hem, ABŞ-ly gurjak ýa-da RMB we ş.m. ýaly pul almak üçin dürli bank hasabymyz bar.
J: T / T, PayPal tarapyndan tölegi kabul edýäris, beýleki töleg usullary hem kabul edilip bilner, Beýleki töleg usullary bilen tölemezden ozal biziň bilen habarlaşyň. Şeýle hem 30-50% goýum bar, galyndy pul iberilmezden öň tölenmeli.
Pes inertiýa
Düwürtiksiz çotga DC hereketlendirijileriniň iň görnükli artykmaçlyklaryndan biri, pes inersiýasydyr. Motoryň ýeňil agramy, ykjam ululygy we azaldylan massasy çalt tizlenmegi we ýokary torky talap edýän ýokary tizlikli programmalar üçin ideal edýär. Mundan başga-da, pes inertiýa dizaýny, hereketiň takyk hereketi üçin möhüm bolan motory çalt başlamaga we durmaga mümkinçilik berýär.
Netijeli işlemek
Düşnüksiz çotga DC hereketlendirijileri netijeliligi bilen bellidir. Motoryň rulon garşylygy pes, bu bolsa az güýji sarp edýär we iş wagtynda az ýylylyk öndürýär. Kuwwatlylygy az sarp etmek, hereketlendirijiniň has az wagtlap iň az güýjünde işläp biljekdigini aňladýar, bu aşa gyzmazdan üznüksiz işlemegi talap edýän programmalar üçin möhümdir.
Agram derejesine ýokary güýç
Düwürtikli çotga DC hereketlendirijileri täsirli güýç-agram derejesine eýe. Motoryň ýokary tork çykyşy bar, bu pes tizlikde işleýärkä köp güýç öndürip biler. Mundan başga-da, hereketlendirijiniň pes agramly dizaýny, iň az energiýa sarp edip, ýokary güýç öndürmäge mümkinçilik berýär.
Sinbad, Europeewropa, Amerika we Günorta-Gündogar Aziýa ýaly ösen ýurtlara we sebitlere eksport edilýän dürli görnüşli 10 milliondan gowrak hereketlendirijini öndürýär. Qualityokary hilli önümlere we ajaýyp müşderi hyzmatyna bolan ygrarlylygymyz, müşderilerimiziň arasynda ajaýyp abraý gazandy. Düwürtiksiz DC hereketlendirijilerimiz, robot we dron, lukmançylyk enjamlary, awtoulag, aragatnaşyk we maglumat tehnologiýasy, awiasiýa, elektrik gurallary, gözellik enjamlary, takyk enjamlar gurallary we harby goranyş ýaly köp pudaklaryň möhüm bölegine öwrülip, ygtybarly we köp taraplydygyny subut etdi. Öňe gidip, Sinbad ýokary derejeli ýadrosyz hereketlendirijilerde pudagyň lideri hökmünde öz ornumyzy saklamagy maksat edinýär. Bir asyr dowam eden däp we hiliň altyn standarty bolan Hytaýyň Faulhaber we Makson bolmaga çalyşýarys.
-
XBD-4045 ýokary tizlikli çotga hereketlendirijisi ...
-
Arzan bahasy XBD-2863 uglerod çotgaly hereketlendirijiler ...
-
XBD-2642 Ösen elektrik 16mm ýadrosyz motor ...
-
Speedokary tizlikli XBD-3270 çotga motor birleşdirijisi ...
-
40mm 4-20W kiçi tizlikli ýokary tizlikli ýadro ...
-
Torokary torkly DC elektrik motorly uglerod çotgasynyň ýadrosy ...