




Suw geçirmeýän ýadrosyz DC motor XBD-1625
Önümiň tanyşdyrylyşy
XBD-1625 suw geçirmeýän ýadrosyz DC hereketlendirijisi bolup, güýçli önüm çykarýarka ýeňil we ykjam dizaýny görkezýär. Bu hereketlendirijiniň esasy aýratynlygy, ygtybarly we çydamly öndürijiligi talap edýän çygly ýerlerde amaly ýerine ýetirmek üçin suw geçirmeýän ukyplylygydyr.
Arza
Sinbad ýadrosyz hereketlendiriji, robotlar, pilotsyz uçarlar, lukmançylyk enjamlary, awtoulaglar, maglumat we aragatnaşyk, elektrik gurallary, gözellik enjamlary, takyk gurallar we harby senagat ýaly köp sanly amaly ulanýar.










Üstünlik
XBD-1625 suw geçirmeýän ýadrosyz DC motorynyň peýdalary:
1. Suw geçirmeýän dizaýn, çygly ýa-da çygly ýerlerde ygtybarly işlemegi üpjün edýär.
2. Düwürtiksiz gurluş, güýçli önüm çykarýan mahaly ýeňil we ykjam dizaýna mümkinçilik berýär.
3. efficiencyokary netijelilik we pes ses işleýşi.
4. qualityokary hilli materiallar we takyk önümçilik amallary sebäpli uzak ömür we çydamlylyk.
5. Robot, dron, suw nasoslary we başga-da köp sanly programma üçin amatly.
6. Pes tehniki talaplar we dürli ulgamlarda gurmak aňsat.
Parametr
| Motor modeli 1625 | |||||
| Gymmat bahaly metal çotga | |||||
| Nominalda | |||||
| Nominal naprýa .eniýe | V | 3.7 | 6 | 12 | 24 |
| Nominal tizlik | rpm | 6800 | 7840 | 8640 | 8800 |
| Nominal tok | A | 0.67 | 0.50 | 0.27 | 0.15 |
| Nominal tork | mNm | 2.5 | 2.8 | 2.7 | 3.0 |
| Mugt ýük | |||||
| Loadük tizligi ýok | rpm | 8500 | 9800 | 10800 | 11000 |
| Loadük ýok | mA | 50 | 20 | 15 | 6 |
| Iň ýokary netijelilikde | |||||
| Iň ýokary netijelilik | % | 76.4 | 82.7 | 79.7 | 82.8 |
| Tizlik | rpm | 7565 | 8967 | 9774 | 10065 |
| Häzirki | A | 0.39 | 0.22 | 0.14 | 0.07 |
| Tork | mNm | 1.39 | 1.19 | 1.28 | 1.29 |
| Iň ýokary çykyş güýji | |||||
| Iň ýokary çykyş güýji | W | 2.82 | 3.59 | 3.81 | 4.37 |
| Tizlik | rpm | 4250 | 4900 | 5400 | 5500 |
| Häzirki | A | 1.60 | 1.23 | 0.66 | 0.37 |
| Tork | mNm | 6.34 | 6.99 | 6.74 | 7.58 |
| Dükanda | |||||
| Tok toguny | A | 3.15 | 2.43 | 1.30 | 0.74 |
| Duralga momenti | mNm | 12.7 | 14.0 | 13.5 | 15.2 |
| Motor yzygiderliligi | |||||
| Terminalyň garşylygy | Ω | 1.17 | 2.47 | 9.23 | 32.43 |
| Terminal induksion | mH | 0.105 | 0.210 | 0.510 | 1.320 |
| Tork hemişelik | mNm / A. | 4.09 | 5.80 | 10.49 | 20.67 |
| Tizlik hemişelik | rpm / V. | 2297.3 | 1633.3 | 900.0 | 458.3 |
| Tizlik / Tork hemişelik | rpm / mNm | 670.3 | 701.3 | 801.4 | 725.2 |
| Mehaniki wagt hemişelik | ms | 6.3 | 6.6 | 7.5 | 6.8 |
| Rotor inersiýasy | g ·cm² | 0.90 | 0.90 | 0.90 | 0.90 |
| Polýus jübütleriniň sany 1 | |||||
| 5-nji tapgyryň sany | |||||
| Motoryň agramy | g | 24 | |||
| Adaty ses derejesi | dB | ≤40 | |||
Nusgalar



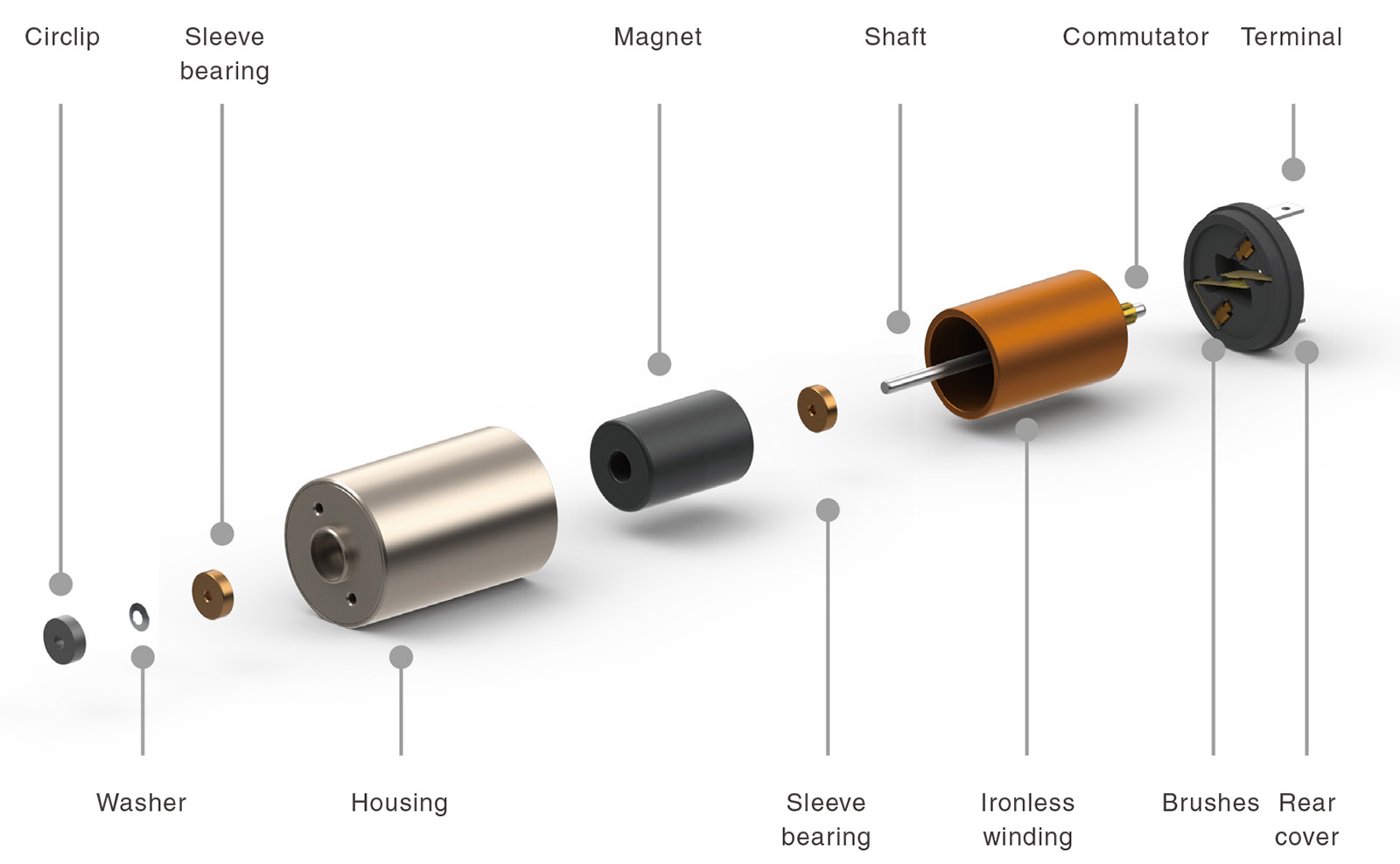
Gurluşlar
Sorag-jogap
J: Hawa. 2011-nji ýyldan bäri Coreless DC Motor-da ýöriteleşen öndüriji.
J: Bizde QC topary TQM-e laýyk gelýär, her ädim standartlara laýyk gelýär.
J: Adatça MOQ = 100pcs. Emma kiçi partiýa 3-5 bölek kabul edilýär.
J: Mysal size elýeterlidir. jikme-jiklikler üçin biziň bilen habarlaşmagyňyzy haýyş edýäris. Nusga tölegini alanymyzdan soň, özüňizi aňsat duýuň, köpçülikleýin sargyt bereniňizde yzyna gaýtarylar.
J: bize gözleg iberiň → sitatamyzy alyň → gepleşikler jikme-jiklikleri → nusgany tassyklaň → şertnama gol çekiň / goýum → köpçülikleýin önümçilik → ýük taýýar → balans / gowşuryş → mundan beýläkki hyzmatdaşlyk.
J: Eltip bermek wagty sargyt eden mukdaryňyza bagly. köplenç 30 ~ 45 senenama güni gerek.
J: T / T-ni öňünden kabul edýäris. Şeýle hem, ABŞ-ly gurjak ýa-da RMB we ş.m. ýaly pul almak üçin dürli bank hasabymyz bar.
J: T / T, PayPal tarapyndan tölegi kabul edýäris, beýleki töleg usullary hem kabul edilip bilner, Beýleki töleg usullary bilen tölemezden ozal biziň bilen habarlaşyň. Şeýle hem 30-50% goýum bar, galyndy pul iberilmezden öň tölenmeli.
-

Gowy hilli XBD-1718 seýrek metal çotgaly motor ...
-
Tatu ruçkasy üçin ýokary tizlikli Coreless DC motor ulanylyşy ...
-
XBD-3045 Grafit çotga DC motor
-

Makson Faulhaber 16mm Precision DC Hollo çalyşyň ...
-

Efficiencyokary netijelilik XBD-3263 grafit çotga motor ...
-
Lukmançylyk enjamlary ýadro çotga dc motor XBD ...