
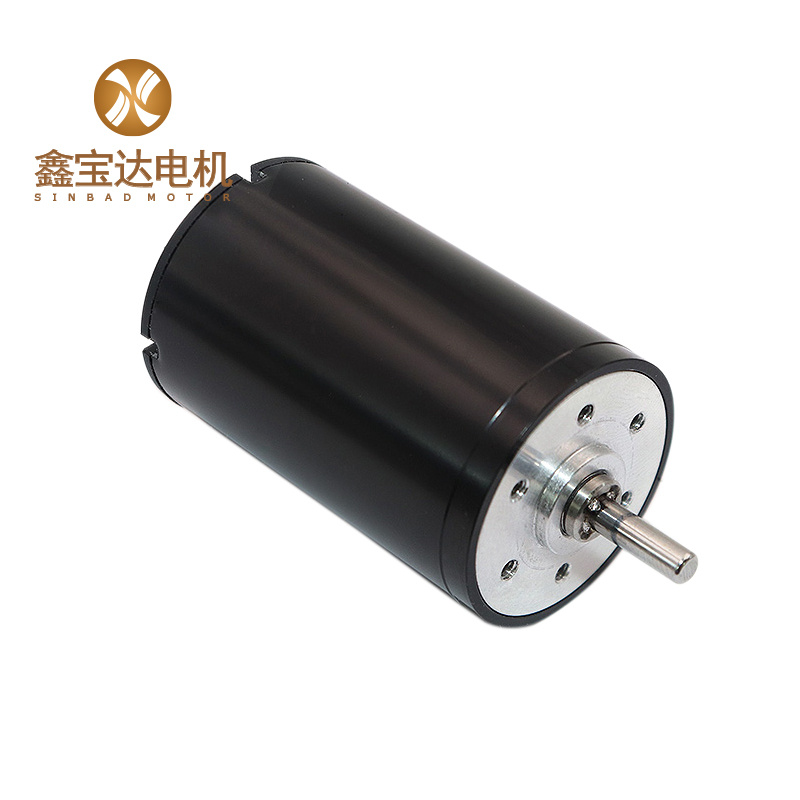



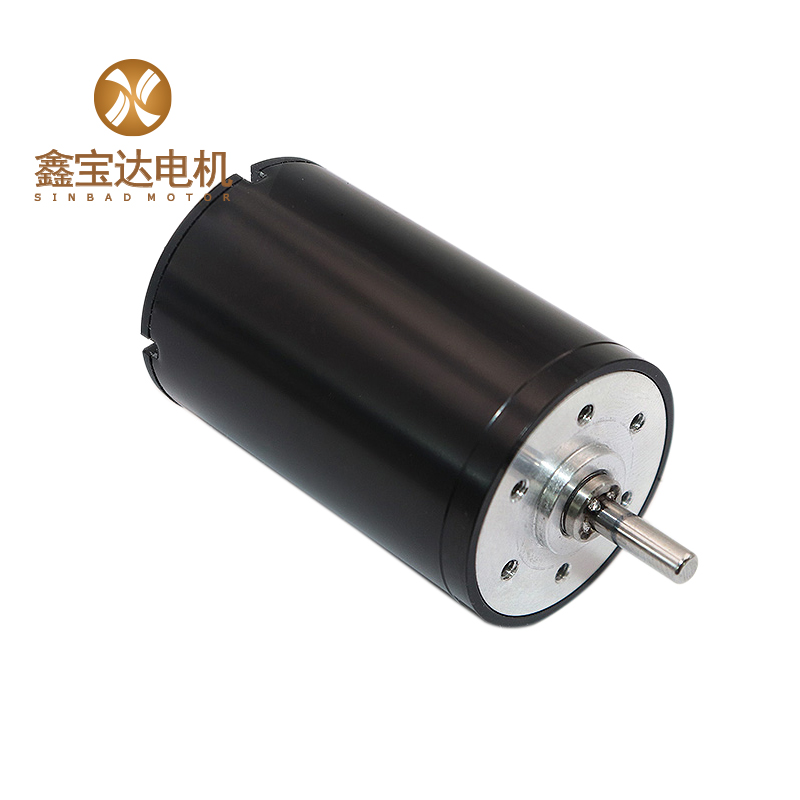
XBD-2642 Gymmatbaha metal çotkaly DC motory
Önümiň tanyşdyrylyşy
XBD-2642 Gymmatbaha Metally Çotgaly DC Motor ýokary öndürijilikli we ygtybarly motor bolup, dürli ulanyşlar üçin amatlydyr. Motor ýokary öndürijilikli we gymmatly metal çotgalaryna eýedir, bu bolsa netijeli we ygtybarly işlemegi üpjün edýär. Ýokary moment çykyşy bilen motor takyk dolandyryşy we talap edilýän ulanyşlar üçin artdyrylan güýji üpjün edýär. Motor ýumşak we sessiz işleýär, bu bolsa ony ses duýgur gurşawlar üçin amatly edýär. Motoryň ykjam we ýeňil dizaýny dürli ulgamlara aňsat integrasiýa etmäge mümkinçilik berýär. Motoryň uzak iş möhleti bar, bu bolsa berkligi we ygtybarlylygy üpjün edýär. Mundan başga-da, motory belli bir ulanyş talaplaryna laýyk getirmek üçin sazlap bolýar. XBD-2642 motory şeýle hem motoryň işini gowulandyrmak üçin integrasiýa edilen reduktor we kodlaýjy opsiýalaryny hödürleýär.
Programma
Sinbad ýadrosyz motory robotlar, dronlar, lukmançylyk enjamlary, awtoulaglar, maglumat we aragatnaşyk, elektrik gurallary, gözellik enjamlary, takyk gurallar we harby senagat ýaly giň ulanylyş ugurlaryna eýedir.










Artykmaçlyk
XBD-2642 Gymmatbaha Metally Çotgalanan DC Motorynyň artykmaçlyklary aşakdakylar:
1. Ýokary öndürijilik we ygtybarlylyk.
2. Ajaýyp elektrik geçirijiligi we gymmat bahaly metal çotgalary, ýokary netijeliligi we ygtybarlylygy üpjün edýär.
3. Ýokary moment çykyşy, takyk dolandyryşy we kuwwaty artdyrýan funksiýany üpjün edýär.
4. Ýumşak işleýiş, pes ses, sese duýgur gurşawlar üçin amatly.
5. Dürli ulgamlara integrasiýa etmek aňsat bolan ykjam we ýeňil dizaýn.
6. Uzak hyzmat möhleti, berkligi we ygtybarlylygy üpjün edýär.
7. Belli bir ulanylyş talaplaryna laýyklykda özleşdirip bolýar.
8. Motoryň işini ýokarlandyrmak üçin integrasiýa edilen reduktorlar we kodlaýjylar üçin opsiýalary hödürleýär.
Parametr
| 2642-nji modeldäki motor | |||||
| Çotga materialy gymmatbaha metal | |||||
| Nominal derejede | |||||
| Nominal naprýaženiýe | V | 6 | 9 | 12 | 24 |
| Nominal tizlik | aýlanma/minut | 4895 | 7476 | 7452 | 7700 |
| Nominal tok | A | 0.44 | 0.64 | 0.43 | 0.39 |
| Nominal moment | mNm | 4.01 | 5.97 | 5.44 | 9.25 |
| Mugt ýük | |||||
| Ýüksüz tizlik | aýlanma/minut | 5500 | 8400 | 8100 | 8800 |
| Ýüksüz tok | mA | 50 | 50 | 45 | 30 |
| Maksimum netijelilikde | |||||
| Maksimum netijelilik | % | 77.8 | 81.7 | 81.7 | 80.7 |
| Tizlik | aýlanma/minut | 5033 | 7686 | 7412 | 8008 |
| Häzirki | A | 0.352 | 0.505 | 0.458 | 0.288 |
| Moment | mNm | 3.1 | 4.6 | 5.8 | 6.7 |
| Maksimum çykyş kuwwatynda | |||||
| Maksimum çykyş güýji | W | 5.3 | 11.9 | 14.4 | 17.0 |
| Tizlik | aýlanma/minut | 2750 | 4200 | 4050 | 4400 |
| Häzirki | A | 1.8 | 2.7 | 2.5 | 1.5 |
| Moment | mNm | 18.2 | 27.1 | 34.0 | 37.0 |
| Saklama ýerinde | |||||
| Duralga tok | A | 3.60 | 5.40 | 4.90 | 2.90 |
| Duralga momenti | mNm | 36.5 | 54.2 | 68.1 | 74.0 |
| Motoryň sabitleri | |||||
| Terminalyň garşylygy | Ω | 1.67 | 1.67 | 2.45 | 8.28 |
| Terminal induktiwligi | mH | 0.062 | 0.070 | 0.160 | 0.290 |
| Moment sabiti | mNm/A | 10.27 | 10.14 | 14.02 | 25.77 |
| Tizlik sabiti | aýlanma/V | 916.7 | 933.3 | 675.0 | 366.7 |
| Tizlik/Moment sabiti | aýlanma/mNm | 150.8 | 154.9 | 119.0 | 119.0 |
| Mehaniki wagt sabiti | ms | 9.11 | 7.68 | 5.90 | 5.79 |
| Rotor inersiýasy | g·cm² | 5.77 | 4.73 | 4.73 | 4.65 |
| Polýus jübütleriniň sany 1 | |||||
| 7-nji fazanyň sany | |||||
| Motoryň agramy | g | 105 | |||
| Adaty ses derejesi | dB | ≤40 | |||
Nusgalar
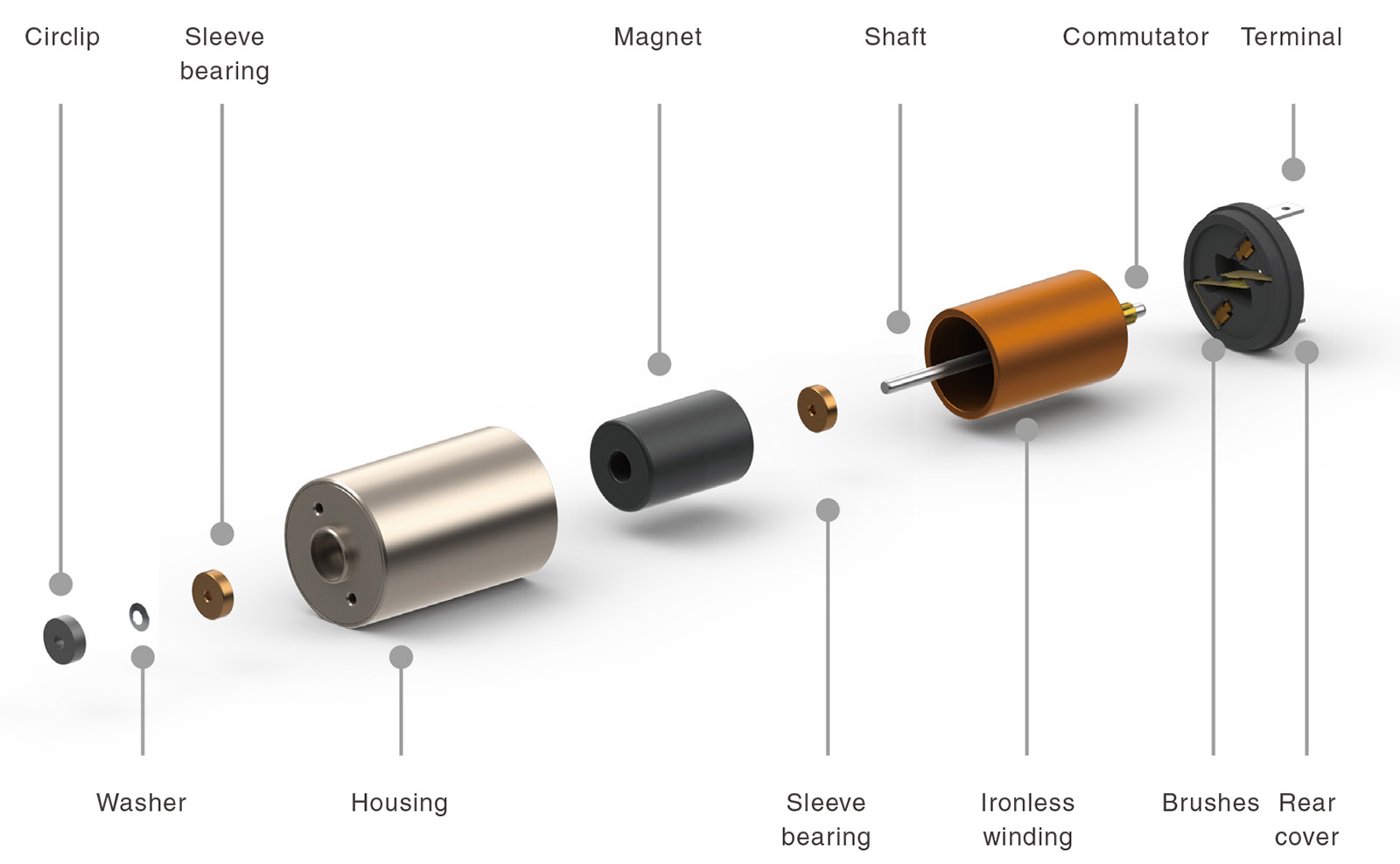
Gurluşlar
Köp soralýan soraglar
A: Hawa. Biz 2011-nji ýyldan bäri özelsiz DC motoryna ýöriteleşen önüm öndüriji.
A: Bizde QC topary TQM-e laýyk gelýär, her ädim standartlara laýyk gelýär.
A: Adatça, MOQ = 100 sany. Ýöne kiçi partiýaly 3-5 sany kabul edilýär.
A: Nusga siziň üçin elýeterlidir. Jikme-jik maglumat üçin biziň bilen habarlaşyň. Sizden nusga tölegini alanymyzdan soň, özüňizi rahat duýuň, köpçülikleýin sargyt edeniňizde puluňyz yzyna gaýtarylar.
A: bize sorag iberiň → teklibimizi alyň → jikme-jiklikleri gepleşik ediň → nusgany tassyklaň → şertnama/goýum gol çekiň → köpçülikleýin önümçilik → ýük taýýar → balans/eltip bermek → mundan beýläk hyzmatdaşlyk ediň.
A: Eltip bermek wagty sargyt eden mukdaryňyza baglydyr. Adatça 30 ~ 45 senenama güni gerek bolýar.
A: Biz T/T-ni öňünden kabul edýäris. Şeýle hem, ABŞ dollary ýa-da RMB ýaly pul almak üçin dürli bank hasaplarymyz bar.
A: Biz tölegleri T/T, PayPal arkaly kabul edýäris, beýleki töleg usullary hem kabul edilip bilner, beýleki töleg usullary bilen tölemezden öň biziň bilen habarlaşyň. Şeýle hem 30-50% öňünden töleg bar, galan pul ibermezden öň tölenmeli.
Ýokary hilli iş görkeziji
Özeni bolmadyk çotkaly DC motorlary örän gowy işleýär. Motor pes ses we titreme bilen rahat işleýär. Mundan başga-da, motoryň ýokary moment çykaryşy ýokary hilli işlemegi üpjün edýär, bu bolsa ony robototehnikada, awtomatlaşdyrmada, lukmançylyk enjamlarynda we awiakosmosda takyk ulanmak üçin amatly edýär.
Uzak ömür
Özensiz çotkaly DC motorynyň hyzmat möhleti uzak. Motor çalt könelmezden uzak wagtlap işlemek üçin niýetlenen. Mundan başga-da, motoryň pes ýylylyk öndürmegi motoryň ömrüni uzaldýar we ony ýyllarboýy üznüksiz işlemegi talap edýän möhüm ulanyşlar üçin amatly edýär.
Netijede
Özensiz çotkaly DC motorlary takyk hereket, pes inersiýa, ýokary güýç-agyr gatnaşygy we netijeli işlemegi talap edýän ýokary öndürijilikli ulanyşlar üçin ajaýyp çözgütdir. Özensiz çotkaly DC motorlary özleriniň kiçi ölçegleri, ýeňil dizaýny we pes ýylylyk öndürmegi bilen motor senagatynda rewolýusiýa döretdi.
Şonuň üçin ygtybarly, netijeli we ýokary öndürijilikli motor gözleýän bolsaňyz, ulanyşyňyz üçin özensiz çotkaly DC motoryny ulanmagy göz öňünde tutuň.
-
Gowy baha XBD-2238 Seýrek metaldan ýasalan çotkaly dc motory...
-
XBD-2030 özeksiz çotkaly motor dc motory ýokary s...
-
Draýwerler üçin XBD-2845 gymmat bahaly metaldan ýasalan çotkaly dc motory...
-
XBD-1524 çotkaly dc motory ýokary tizlikli elektrik motory...
-
Gyzgyn satylýan XBD-1630 uglerodly elektrikli motosikl...
-
XBD-1625 12V BLDC Motor Coreless Robot Joint Fr...